- Italia
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
Cos'è un amplificatore di potenza? Principi di funzionamento, classi e prestazioni
Catalogo
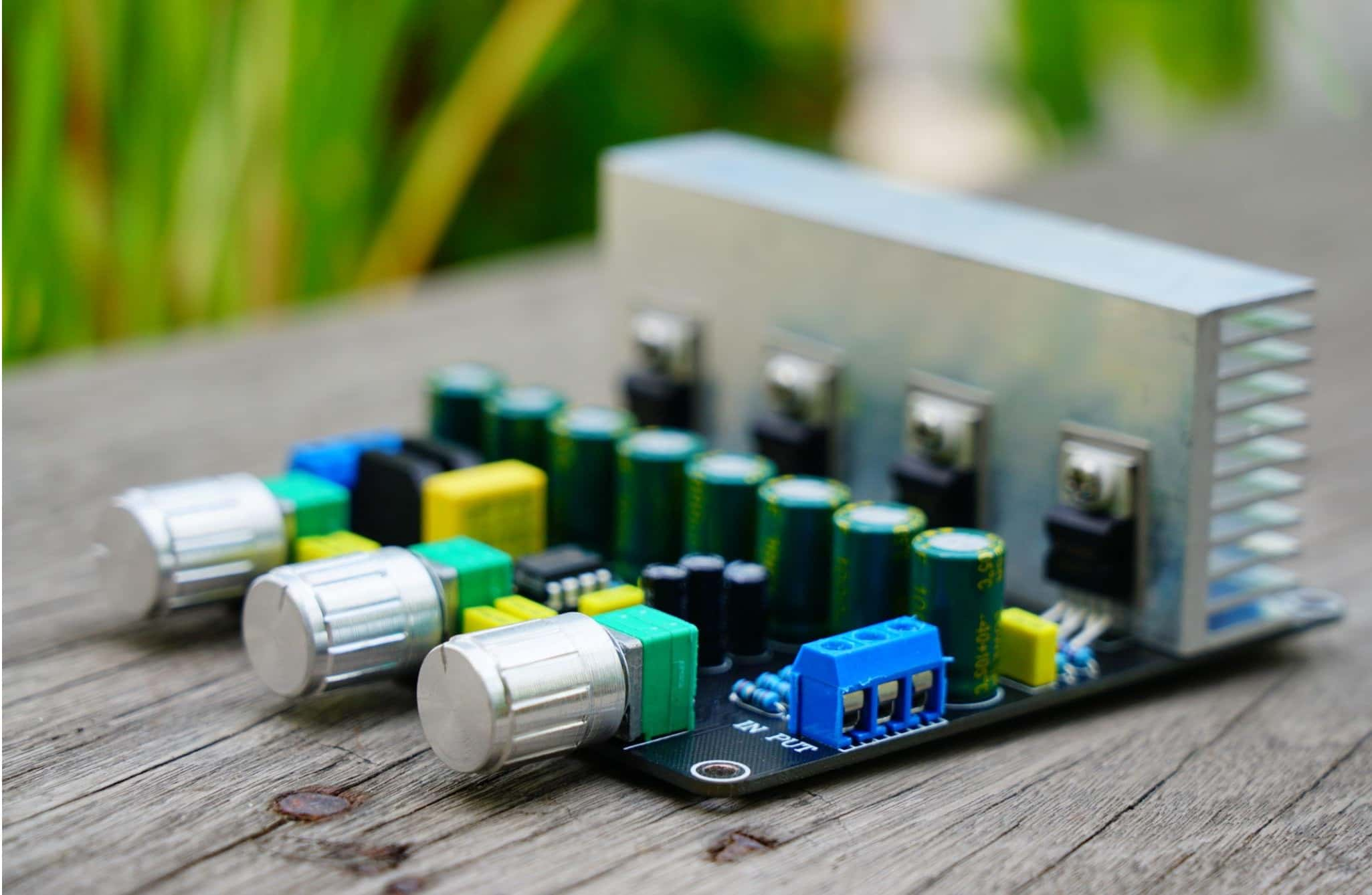
Come funziona un amplificatore di potenza
Un amplificatore di potenza riceve un segnale di ingresso piccolo e denso di informazioni e produce un segnale di uscita più grande che può fornire potenza utilizzabile a un carico. Un comune punto di confusione si presenta quando il segnale di ingresso non fornisce energia significativa, eppure l'uscita trasporta una potenza molto più alta. La spiegazione diventa chiara dopo aver separato i ruoli della sorgente del segnale e della sorgente di energia esterna.
Cosa scala effettivamente
Il dispositivo attivo funziona come un elemento di conduzione controllabile, quindi l'energia di uscita dell'amplificatore è prelevata dalle linee di alimentazione DC piuttosto che prodotta dall'ingresso. L'onda di ingresso decide principalmente quando e con quale intensità il dispositivo conduce, il che a sua volta controlla quanta energia di alimentazione raggiunge il carico.
Un modello mentale pratico che tende a rimanere utile sotto pressione di debug è questo: l'ingresso è un segnale di comando, e l'alimentazione è il serbatoio che fornisce l'energia di uscita. Quando si presentano problemi a livelli di uscita elevati, la causa è spesso correlata all'alimentazione, alla messa a terra o ai percorsi di corrente, piuttosto che alla sorgente del segnale a piccolo segnale stesso.
Nei stadi di uscita BJT, la corrente di collettore è influenzata dalla guida base-emettitore. È facile affezionarsi all'idea che il guadagno del transistor (β) porterà il design, e quella convinzione può sembrare confortante durante i calcoli iniziali. In pratica, i design che si mantengono stabili in varie condizioni di temperatura, dispersione tra unità e invecchiamento sono solitamente organizzati in modo che il guadagno complessivo e la linearità derivino dall'architettura circostante e dalla retroazione, non dal fidarsi che β rimanga gentile.
Negli stadi MOSFET e GaN, la tensione del gate regola principalmente la conduttività del canale. Dopo che la polarizzazione è impostata correttamente, la corrente di drenaggio diventa una replica modellata dell'ingresso. Il gate sembra facile in stato stazionario perché assorbe molto poca corrente DC, ma richiede comunque rispetto nell'operazione dinamica: capacità e movimento di carica possono far lavorare il driver più di quanto ci si aspetti, soprattutto ad alta frequenza o quando i bordi di commutazione sono aggressivi.

Dispositivi attivi comuni utilizzati negli stadi di potenza:
• BJT
• MOSFET
• GaN HEMT.
Polarizzazione: selezionare una regione operativa che rimanga prevedibile
La polarizzazione stabilisce un punto di funzionamento di quiescenza in modo che il dispositivo rimanga nella regione intesa durante l'oscillazione del segnale. La parte scomoda, familiare a chiunque abbia osservato il drift della polarizzazione durante una lunga sessione di test, è che la giusta polarizzazione all'accensione potrebbe non essere la giusta polarizzazione dopo un assorbimento termico.
Nelle classi lineari, il punto di polarizzazione è scelto in modo che il dispositivo rimanga nella sua regione lineare o quasi lineare per la maggior parte dell'onda. Questo compromesso è direttamente visibile sia nelle misurazioni FFT sia nella temperatura del dissipatore.
Le fasi push-pull espongono la tensione più comune nella regione di incrocio:
• Se la polarizzazione è impostata bassa, la distorsione di incrocio diventa misurabile e, nelle applicazioni audio, spesso soggettivamente irritante a livelli bassi.
• Se la polarizzazione è impostata alta, la dissipazione a riposo aumenta e il margine termico si restringe in modi che possono far sentire meno certe le affidabilità a lungo termine.
Molte configurazioni pratiche finiscono per essere sintonizzate attraverso iterazioni: impostare il bias, misurare la distorsione di basso livello, riscaldare l'unità, quindi misurare di nuovo. Il comportamento a freddo e a caldo può differire a tal punto che sembra che tu stia convalidando due amplificatori diversi, anche se lo schema non è mai cambiato.
Opzioni di Classe Lineare:
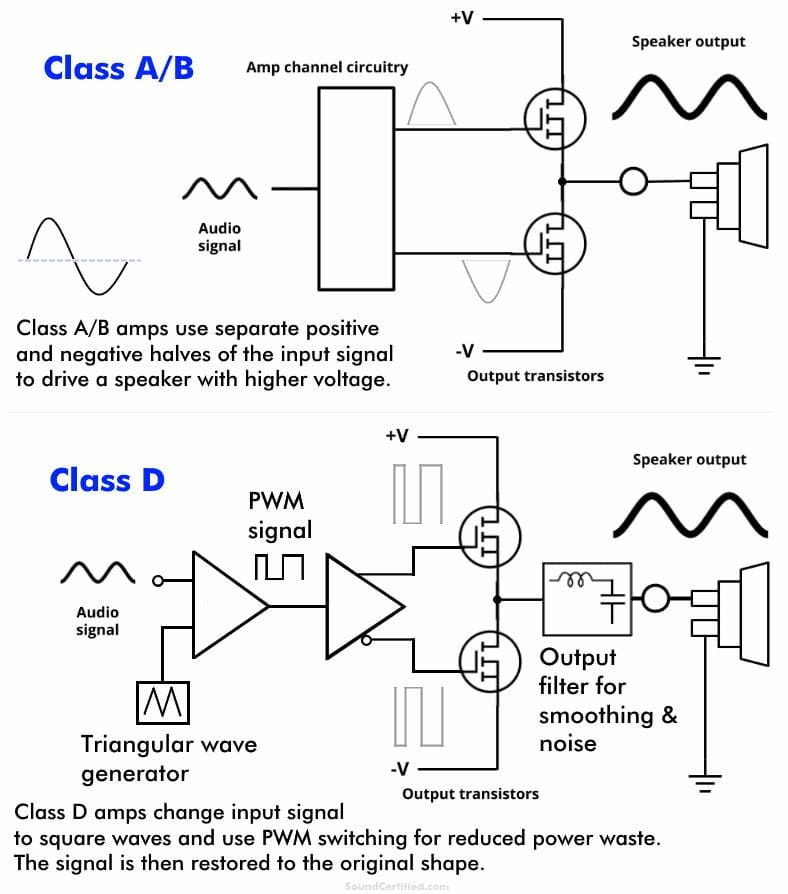
• Classe A
• Classe AB
• Classe B.
Nella Classe D, i dispositivi di uscita trascorrono la maggior parte del loro tempo a funzionare come interruttori piuttosto che operare come elementi di conduzione lineare. L'input viene trasformato in un modello di impulso (spesso PWM o un metodo di modulazione correlato), la fase di alimentazione commuta l'alimentazione in una rete di uscita, e un filtro LC ricostruisce l'onda baseband al carico.
Il lavoro di design qui porta spesso un tipo molto specifico di ansia: spingere l'efficienza e spingere la robustezza non sempre sembrano allineati. Maggiore efficienza può aumentare la sensibilità ai parasitici, agli errori di tempo morto e agli artefatti del bordo di commutazione. Nell'hardware reale, un cambiamento di layout apparentemente minore, spostando un'anello ad alta corrente di pochi centimetri, può far passare un design da uno spettro pulito a EMI persistente che si rifiuta di scomparire fino a quando il percorso di corrente non viene ristretto.
Elementi comuni di Modulazione / Ricostruzione:
• PWM
• Filtro di uscita LC.
Linearità e Stabilità
Un amplificatore di potenza include molto più di un transistor di uscita e una resistenza. Il circuito circostante controlla il trasferimento del segnale, riduce la distorsione e mantiene la stabilità in condizioni di carico difficili. Il funzionamento stabile con altoparlanti reattivi, cattiva messa a terra e condizioni difficili dei cavi dipende da un'attenta progettazione del circuito.
Il feedback negativo viene comunemente applicato per stabilire un guadagno a ciclo chiuso ripetibile e ridurre la non linearità. Una mentalità produttiva è quella di consentire che il comportamento a circuito aperto sia imperfetto, a volte anche disordinato, purché sia prevedibile e suffisamment stabile affinché il feedback possa correggere all'interno della larghezza di banda che ti interessa.
Il feedback comporta obblighi. Se il ritardo di fase si accumula e i margini non sono sani, l'amplificatore potrebbe rintonare o oscillare, specialmente con carichi reattivi o cavi lunghi. Questo è uno di quei modi di guasto che può sembrare personalmente offensivo quando appare solo dopo l'assemblaggio, perché lo schema potrebbe sembrare impeccabile mentre l'implementazione fisica ha silenziosamente cambiato la dinamica del loop.
Resistenze di emettitore (BJT) o resistenze di sorgente (MOSFET) aggiungono feedback locale che linearizza il comportamento del dispositivo e migliora la condivisione della corrente tra i dispositivi di uscita paralleli. I metodi di degenerazione sono spesso preferiti perché aiutano a prevenire l'impatto di corrente causato dalla deriva termica tra i dispositivi abbinati.
Questa tecnica migliora anche la coerenza da unità a unità, il che è importante quando l'obiettivo è un prodotto che si comporta lo stesso lunedì mattina e dopo un anno sul campo.
Componenti di Degenerazione per Tipo di Dispositivo:
• Resistenze di emettitore (BJT)
• Resistenze di sorgente (MOSFET).
La compensazione è usata per modellare la larghezza di banda e controllare il comportamento ad alta frequenza, particolarmente dove i parasitici possono dominare. Le fasi di uscita sono esposte perché il carico è raramente puramente resistivo nelle installazioni reali.
L'ambiente di carico introduce elementi che possono destabilizzare un design altrimenti ben comportato:
• Gli altoparlanti possono essere induttivi e risonanti.
• I cavi aggiungono capacità e induttanza distribuite.
• I connettori e l'impianto elettrico introducono piccole ma significative discontinuità di impedenza.
Una lezione ricorrente dalle transizioni banco-campo è che stabile con una resistenza da 8 ohm non garantisce stabilità in un sistema vivo. I controlli di stabilità di solito vanno meglio quando convalidati contro carichi ai limiti, capacitivi, induttivi e combinazioni, piuttosto che solo il carico ordinato da laboratorio.
Elementi Comuni di Compensazione e Smorzamento:
• Condensatori di Miller
• Reti di lead/lag
• Reti Zobel
• Induttori di uscita
• Resistenze stopper gate/base.
Accoppiamento di Uscita e Gestione del DC: Mantenere il DC lontano dal Carico
Poiché molte fasi di uscita si trovano a un punto di funzionamento DC interno, il design deve garantire che il carico non sia esposto a DC dannosi. Le persone tendono a sentirsi fortemente su questo argomento per un semplice motivo: quando si verificano guasti DC, sono spesso costosi, rumorosi e rapidi.
Gli amplificatori a fornitura singola possono utilizzare un condensatore di accoppiamento in uscita per bloccare il DC. I trasformatori possono fornire isolamento e trasformazione di impedenza, ma sono meno comuni nell'audio consumer moderno a causa di dimensioni, costi, vincoli di larghezza di banda e meccanismi di distorsione aggiuntivi.
Opzioni di Accoppiamento / Isolamento:
• Condensatore di accoppiamento in uscita
• Trasformatore.
Un approccio ampiamente utilizzato è un'alimentazione a binario diviso (ad esempio, ±V rails) in modo che l'uscita possa rimanere vicino a 0 V ed essere accoppiata in DC al carico. Questo generalmente migliora il comportamento alle basse frequenze e riduce la dipendenza da grandi elettrolitici, ma sposta l'attenzione verso il controllo dell'offset e la deriva a lungo termine.
Un servocomando DC può correggere piccoli offset utilizzando un percorso di feedback correttivo lento che evita di disturbare la banda audio. La circuiteria di protezione osserva condizioni che tendono a rovinare gli altoparlanti e gli stadi di uscita in pratica: offset in uscita, sovracorrente e aumento della temperatura. Quando viene rilevato un guasto, può disconnettere il carico utilizzando un relè o un interruttore elettronico.
Ciò che rende quest'area emotivamente frustrante in laboratorio è che il comportamento errato può essere lento e ritardato. Piccoli offset che sembrano innocui durante la configurazione iniziale possono deviare dopo un assorbimento termico o dopo un transitorio di alimentazione. I progetti che sopravvivono all'uso reale tipicamente anticipano queste modalità di guasto scomode e a basso drama piuttosto che assumere che il sistema rimarrà sempre in uno stato ideale di riposo.
Condizioni comunemente monitorate dai circuiti di protezione:
• Offset DC in uscita
• Sovracorrente
• Sovratemperatura.
Un modo affidabile per comprendere un amplificatore di potenza è trattarlo come un sistema il cui comportamento è fortemente influenzato dall'alimentazione, dal design termico, dal layout della PCB, dalla strategia di protezione e dai circuiti di controllo. La scelta del dispositivo (BJT vs MOSFET vs GaN) cambia le restrizioni e apre diverse opportunità, ma le prestazioni quotidiane sono frequentemente dominate dalla strategia di polarizzazione, dalla stabilità del circuito di feedback e da come il progetto risponde a carichi reali e a condizioni operative reali.
In molti progetti affidabili, le prestazioni spesso dipendono più da un'implementazione accurata che dai componenti avanzati. Fattori importanti includono i percorsi di ritorno della corrente, la struttura di messa a terra, il posizionamento della compensazione e il controllo della polarizzazione stabile attraverso le variazioni di temperatura. Questi dettagli aiutano a creare amplificatori che rimangono stabili, precisi e affidabili durante i test e il funzionamento a lungo termine.
Classi di amplificatori di potenza e principi di funzionamento
Gli amplificatori di potenza sono spesso raggruppati per classe, un'etichetta legata all'angolo di conduzione dei dispositivi di uscita su un periodo di segnale. Quell'etichetta suggerisce anche una scelta di design più profonda: se i dispositivi di uscita sono previsti per comportarsi come elementi lineari, come interruttori o come un mix gestito di entrambi.
Nei prodotti reali, il nome della classe raramente predice l'esito finale dell'ascolto o della misurazione da solo. Il risultato tende a essere influenzato da come il design si comporta quando le condizioni smettono di essere da manuale, ad esempio quando la temperatura aumenta, il carico diventa reattivo o le tolleranze di fabbricazione si accumulano. Molti problemi di design difficili derivano dalla deriva lenta, dalle condizioni di caso limite e dalle transizioni di stato in cui il comportamento stabile del circuito deve comunque essere mantenuto.
Un modo pratico per definire le classi di amplificatori è tornare sempre a due domande:
• Dove finisce per essere dissipata l'energia nelle condizioni operative?
• Cosa mantiene il comportamento della distorsione coerente mentre temperatura e carico variano?
Classe A
La Classe A mantiene il dispositivo di uscita in conduzione per l'intero ciclo. Poiché il dispositivo non si spegne, non c'è un intervallo di passaggio tra i dispositivi, il che di solito significa che non c'è un artefatto di crossover classico da gestire. Quando il circuito è polarizzato in modo conservativo, la linearità del segnale debole può apparire rassicurantemente ben comportata, e lo spettro di distorsione rimane spesso liscio piuttosto che brusco.
Il compromesso si manifesta immediatamente nella dissipazione di potenza. La Classe A assorbe una corrente sostanziale anche in idle, e quella corrente diventa calore che audio stia suonando o meno. In molti progetti reali, lo schema smette di essere il fattore limitante molto prima che lo faccia il design termico. È comune sentirsi sicuri dopo una simulazione, per poi essere umiliati da un telaio che funziona più caldo del previsto dopo un'ora sulla panca.
Il comportamento termico finisce per essere definito da molteplici dettagli fisici che interagiscono in modi facili da sottovalutare:
• Dimensionamento del dissipatore e massa termica
• Resistenza termica giunzione-caso e caso-dissipatore
• Selezione del materiale di interfaccia e coerenza della pressione di montaggio
• Percorsi di flusso d'aria, ventilazione dell'involucro e assunzioni sulla temperatura ambiente
Le persone che hanno eseguito debug di amplificatori di Classe A spesso ricordano i piccoli cambiamenti fisici che in pratica non erano affatto piccoli. Ad esempio, spostare un dispositivo di rilevamento della polarizzazione o alterare il suo accoppiamento termico può spostare i punti di funzionamento abbastanza da cambiare la distorsione e la stabilità in sessioni lunghe. I progetti di Classe A tendono a funzionare meglio quando sono considerati come sistemi termici con un circuito audio al loro interno, non il contrario.
Classe B
La Classe B utilizza tipicamente un sistema push-pull in cui ogni dispositivo conduce per circa metà dell'onda. L'efficienza migliora perché la corrente di quiescenza può essere mantenuta bassa e la dissipazione del dispositivo diminuisce significativamente quando non c'è segnale.
La difficoltà si concentra nella regione dello zero-crossing. I veri BJT e MOSFET non iniziano a condurre a una soglia idealizzata; necessitano di una tensione/corrente finita e transitano gradualmente. Questo comportamento può creare un'increspatura o una discontinuità durante l'interruzione tra i dispositivi, motivo per cui l'operazione pura in Classe B è raramente utilizzata nei sistemi audio ad alta fedeltà.
Sul banco di prova, la Classe B può sembrare ragionevolmente pulita a livelli di uscita più elevati, per poi diventare deludentemente evidente a bassa uscita, dove la regione di crossover occupa una frazione maggiore dell'onda. I carichi rendono questo più complicato: gli altoparlanti non presentano una resistenza ordinata, e la loro magnitudo di impedenza e l'angolo di fase variano con la frequenza. In termini pratici, la Classe B può essere allettante per la sua efficienza, ma tende a richiedere un livello di disciplina nello zero-crossing che i veri dispositivi e i veri altoparlanti non forniscono naturalmente.
Classe AB
La Classe AB può essere vista come Classe B con un bias di quiescenza introdotto deliberatamente in modo che entrambi i dispositivi conducano leggermente attorno allo zero crossing. Questa sovrapposizione riduce la distorsione di crossover mantenendo l'efficienza molto più vicina alla Classe B che alla Classe A. Per molti prodotti audio, la Classe AB finisce per essere il “baseline” familiare perché si adatta bene e si presta a un'ampia gamma di obiettivi di prezzo e potenza.
Ciò che separa un design Classe AB confortevole da uno temperamentalmente instabile è solitamente il controllo del bias in presenza di calore. Il bias è spesso impostato con un moltiplicatore Vbe o un servo di bias, e il meccanismo di bias deve tracciare la temperatura con sufficiente fedeltà per evitare che la situazione diventi ingestibile mentre il dissipatore si scalda. La parte complicata è che “tracciare la temperatura” non è semplicemente un'affermazione elettrica, riguarda anche il posizionamento meccanico e il accoppiamento termico.
I dettagli di implementazione che compaiono ripetutamente nelle costruzioni reali includono:
• Posizionamento del sensore di bias rispetto ai dispositivi più caldi
• Qualità e ripetibilità del contatto termico con il dissipatore/dispositivo
• Sensibilità alle variazioni di assemblaggio
• Deriva al riscaldamento e comportamento della temperatura dell'involucro in stato stazionario
Un comune schema di comportamento è che un amplificatore misura un'uscita impressionantemente pulita quando è freddo, per poi subire un aumento della distorsione, o anche una stabilità marginale, dopo che l'involucro raggiunge l'equilibrio termico. I design di Classe AB che invecchiano bene tendono a trattare il bias come un problema di controllo dinamico che deve rimanere costante nel tempo, con variazioni di unità e ventilazione realistica. La bassa distorsione è raramente un singolo punto dolce; è più simile a una regione stabile che il design deve mantenere intatta mentre l'ambiente cambia.
Classe C
La Classe C conduce per meno di 180° del ciclo. L'onda di corrente del dispositivo grezzo è intenzionalmente lontana dall'essere sinusoidale, il che la rende un cattivo abbinamento per la fedeltà audio. Negli sistemi RF, quella distorsione non è l'uscita finale; è uno stato intermedio che viene modellato dalla rete di carico.
Una rete LC sintonizzata all'uscita seleziona la frequenza fondamentale desiderata e sopprime le armoniche, permettendo alla tensione fornita alla frequenza operativa di apparire vicino a sinusoidale. L'enfasi progettuale si sposta dalla planarità dell'ampiezza a largo spettro e verso il trasferimento di potenza a banda stretta e la modellazione spettrale.
Il lavoro orientato alla RF della Classe C tende a ruotare attorno a un insieme specifico di manopole:
• Progettazione della rete risonante e comportamento di sintonizzazione
• Abbinamento di impedenza e rapporti di trasformazione
• Selezione del fattore Q, compromessi in larghezza di banda e gestione delle perdite
• Stress del dispositivo mentre la rete si disaccorda o il carico cambia
Nella pratica, l'amplificatore e la rete di uscita operano come un sistema connesso. Piccole variazioni di sintonizzazione o carico possono rapidamente influenzare l'efficienza, la potenza di uscita e lo stress del transistor. Pertanto, le prestazioni dell'amplificatore dipendono fortemente dalla rete di abbinamento collegata ad esso.
Classe D
La Classe D utilizza i dispositivi di uscita come interruttori piuttosto che come elementi lineari. L'audio è codificato tramite PWM o un metodo di modulazione simile e poi ricostruito da un filtro passa-basso LC. Poiché i dispositivi trascorrono la maggior parte del tempo completamente accesi o completamente spenti, la dissipazione è molto inferiore e i design moderni raggiungono comunemente un'efficienza molto alta.
Il vero lavoro nella Classe D è gestire gli artefatti di commutazione affinché non si trasformino in distorsioni udibili, emissioni radiate o guasti intermittenti. I guadagni di alta efficienza sono ottenuti in questi design, ma effetti nascosti da parasitici e disposizione fisica possono anche creare problemi di progettazione difficili.
Le tecniche che vengono frequentemente utilizzate per mantenere comportamenti controllati includono:
• Feedback ad alta guadagno anello
• Controllo del tempo morto per ridurre la distorsione e evitare il “shoot-through”
• Dispositivi a commutazione rapida per ridurre le perdite di transizione
Le scelte tecnologiche dei dispositivi possono cambiare lo spazio di compromesso. I dispositivi GaN, ad esempio, possono ridurre le perdite di commutazione e migliorare il comportamento ad alta frequenza, ma puniscono anche un layout trascurato perché i parasitici diventano più dominanti man mano che le velocità di transizione aumentano.
Molti fallimenti della Classe D possono essere ricondotti a temi di implementazione fisica che sembrano banali finché non lo sono:
• Geometria di ritorno a terra e contenimento del loop di corrente
• Area del loop di pilotaggio del gate e percorsi di accoppiamento
• Selezione del snubber e strategia di smorzamento
• Contenimento EMI tramite posizionamento, schermatura e filtraggio
Le prestazioni della Classe D sono in gran parte una storia di controllo del comportamento RF indesiderato, mantenendo al contempo una linearità prevedibile nella banda audio. Quando funziona bene, può suonare senza sforzo; quando va male, può essere testarda in modi difficili da diagnosticare con strumenti esclusivamente focalizzati sull’audio.
Classe T
La Classe T è meglio compresa come una strategia di controllo sovrapposta a uno stadio di uscita a commutazione piuttosto che come una fisica dello stadio di potenza fondamentalmente diversa. L’accento è posto su tempi adattivi e approcci simili allo spettro diffusivo che ridistribuiscono l’energia di commutazione per ridurre i picchi EMI concentrati. Sebbene il termine abbia una storia di branding, molte delle idee sottostanti si presentano ampiamente nei moderni design audio switching a basso rumore.
Nello sviluppo reale dei prodotti, queste strategie di controllo diventano particolarmente rilevanti quando l'amplificatore deve superare i test di emissione rimanendo silenzioso con altoparlanti ad alta sensibilità o all'interno di contenitori compatti. Le prestazioni audio pulite e la conformità EMI dipendono spesso dagli stessi fattori, inclusi comportamento di commutazione prevedibile, loop di controllo stabili e filtraggio consistente tra le unità di produzione.
Le preoccupazioni di design che tendono a essere trattate come un obiettivo combinato in implementazioni solide includono:
• Strategia di modulazione e distribuzione spettrale
• Progettazione del feedback e stabilità del loop attraverso variazioni di carico/filtraggio
• Scelte di filtraggio dell’uscita e sensibilità alla tolleranza
• Pianificazione della compatibilità elettromagnetica dalle prime decisioni di layout
Quando gli approcci in stile Classe T sono eseguiti bene, il beneficio è meno legato a categorie di marketing e più a una firma di commutazione più calma e ripetibile che rimane ben educata attraverso altoparlanti, contenitori e impostazioni di test regolatorie.
Blocchi di costruzione dell'amplificatore di potenza

Un amplificatore di potenza che sopravvive al di fuori di un libro di testo è quasi mai un circuito che fa tutto. Comporta più come una catena coordinata di stadi, e ogni stadio copre silenziosamente una limitazione che si presenta prima o poi nell'uso reale: l'ingresso raccoglie fruscii e ronzii, gli stadi centrali esauriscono l'escursione di tensione, lo stadio di uscita affronta un forte stress di corrente, il calore sposta lentamente i punti di funzionamento, e il carico può apparire nulla di simile a una pulita resistenza. I design che guadagnano fiducia a lungo termine trattano solitamente questi blocchi come un sistema, perché le sorprese tendono a derivare da interazioni, margini di stabilità, decisioni di messa a terra, deriva termica e dinamiche di alimentazione, piuttosto che dall’indice di guadagno principale.
Stadio di ingresso / Preamplificatore
Lo stadio di ingresso imposta il tono per tutto ciò che viene dopo. Modella come la fonte vede l'amplificatore, stabilisce il comportamento di riferimento e definisce le aspettative per il rumore molto prima che qualsiasi potenza di segnale grande sia coinvolta. Un comportamento di ingresso coerente attraverso cavi diversi, fonti di segnale e condizioni di installazione è spesso preferito perché aiuta a ridurre fruscii intermittenti e rumori indesiderati.
Alta impedenza di ingresso e compatibilità con la sorgente
Alta impedenza di ingresso riduce il caricamento sulla sorgente e aiuta a evitare spostamenti della risposta in frequenza causati dall'impedenza della sorgente che interagisce con la capacità di ingresso. I problemi pratici tendono a comparire con lunghe connessioni, controlli di volume passivi o sorgenti di impedenza insolitamente alta; in quei casi, un buffer di ingresso ben educato mantiene le prestazioni da trasformarsi in un esperimento di lunghezza del cavo. Quando l'ingresso è tollerante, la risoluzione dei problemi diventa più calma: meno momenti in cui succede solo con questo cavo, e meno sorprese quando un sistema viene spostato dalla panchina al rack.
Struttura di guadagno/volume e gestione del margine
Una struttura di guadagno bilanciata previene la distorsione precoce mantenendo comunque un'uscita completa a livelli di ingresso normali. Un guadagno eccessivo può aumentare il rumore e rendere la regolazione del volume troppo sensibile, mentre un guadagno insufficiente può sovraccaricare le attrezzature a monte e produrre suoni aspri. Molti design posizionano i livelli di ascolto normali vicino al centro dell’intervallo di controllo del volume mantenendo un margine extra per i picchi audio brevi.
Incorporamento, schermatura e scelte di dispositivi a bassa rumorosità
Le prestazioni del rumore sono generalmente determinate dai percorsi di corrente e dall'integrità del riferimento più che da blocchi schematici elaborati. Concetti di terra a stella, percorsi di ritorno brevi e deliberati, connessioni al telaio scelte con attenzione e schermature disciplinate spesso superano le sostituzioni incrementali dei componenti. I dispositivi di ingresso a basso rumore possono aiutare, ma non annullano un ciclo di terra o perdonano un nodo ad alta impedenza instradato accanto a correnti di commutazione. Un modello osservato nella risoluzione dei problemi reali è che le costruzioni silenziose sono quelle in cui le correnti di ritorno sono state intenzionalmente guidate fin dall'inizio, non scoperte dopo la prima lamentela di ronzio.
Stadio Driver / Amplificatore di Tensione (VAS)
Questo stadio è dove viene sviluppato il maggior guadagno di tensione e l'escursione di tensione, e fornisce anche la corrente dinamica utilizzata per caricare e scaricare le capacità dei dispositivi di uscita. Quando un amplificatore si comporta in modo prevedibile con diversi altoparlanti, lunghezze di cavo e temperature, le scelte VAS / driver sono solitamente parte della ragione. Quando appare un comportamento instabile, questa sezione viene spesso controllata perché piccoli problemi possono influenzare l'intero ciclo di feedback.
Produrre Escursione di Tensione con Comportamento Lineare
Il VAS deve oscillare vicino ai binari di alimentazione senza scivolare in regioni non lineari che rendono più difficile prevedere il comportamento del feedback. Questo stadio è comunemente polarizzato per mantenere stabile la transconduttanza e il guadagno attraverso diversi livelli di segnale perché piccole non linearità possono successivamente aumentare la distorsione attraverso il comportamento del ciclo di feedback. Nella pratica, un VAS che rimane composto a grandi oscillazioni si traduce spesso in un amplificatore che suona meno teso quando spinto, anche se i numeri del banco sono già rispettabili.
Pilotaggio di Carichi Capacitive all'Interno dell'Amplificatore
A frequenze elevate, i BJT o MOSFET di uscita presentano un carico fortemente capacitivo. Se il VAS non riesce a fornire e assorbire corrente rapidamente, la distorsione transiente aumenta e i margini di stabilità si rimpiccioliscono in un modo che può apparire solo con bordi veloci o condizioni reattive. Ecco perché molte progettazioni robuste funzionano con più corrente di riposo nel VAS / driver di quanto una semplice calculazione basata su carta potrebbe suggerire: tende a produrre transizioni più pulite, comportamento di fase più prevedibile e meno dramma quando lo stadio di uscita lavora duramente.
Compensazione e Modellazione della Frequenza
Qui è dove il comportamento del ciclo viene modellato utilizzando scelte di compensazione che scambiano la larghezza di banda per un margine di fase controllato in condizioni sfavorevoli. L'obiettivo è tipicamente una larghezza di banda che rimane ben comportata, non un numero della scheda tecnica che sembra impressionante in isolamento. L'esperienza dimostra che un amplificatore può funzionare bene con carichi resistivi ma diventare instabile con cavi altoparlanti lunghi o altoparlanti reattivi. Testare la compensazione con carichi e cablaggi realistici aiuta a prevenire problemi di stabilità in fase finale.
Cascodi e Isolamento degli Stadi
Il cascoding può ridurre gli effetti Miller e mantenere più costanti le tensioni dei dispositivi, il che spesso migliora la linearità e rende più facile gestire il polo dominante. Diventa particolarmente attraente con tensioni di rail più elevate, o quando il progetto deve mantenere un comportamento coerente attraverso sostituzioni di dispositivi e cambi di temperatura. I cascodi sono spesso preferiti nei progetti di produzione perché riducono la variazione da transistor a transistor senza richiedere delicate regolazioni di taratura.
Stadio di Uscita / Potenza
Lo stadio di uscita è dove l'amplificatore incontra il mondo disordinato: impedenze complesse degli altoparlanti, improvvisi cali di impedenza a determinate frequenze, cortocircuiti accidentali e transitori che non chiedono permesso. I buoni stadi di uscita tendono a sembrare indifferenti ai carichi reali, e quel comportamento calmo di solito deriva da una gestione conservativa dello sforzo piuttosto che da un'operazione eroica vicino ai limiti del dispositivo.
Topologie per la Consegna di Alta Corrente
Le implementazioni comuni di uscita includono follower emettitori complementari (BJT) e follower di sorgente (MOSFET). La scelta della topologia dipende tipicamente da come il design gestisce il comportamento di polarizzazione, le tendenze termiche e lo stress sui dispositivi sotto correnti reali, non da quale opzione è attualmente di moda. I punti operativi stabili sono spesso preferiti perché mantengono prestazioni affidabili durante i cambiamenti di temperatura, le condizioni di ventilazione e i diversi carichi degli altoparlanti.
Dispositivi Parallelati e Condivisione della Corrente
I design ad alta potenza spesso parallelano più dispositivi di uscita per distribuire la dissipazione e ridurre lo stress per dispositivo. I resistori di zavorra (resistori emettitore/sorgente) incoraggiano la condivisione della corrente e riducono il rischio che un dispositivo monopolizzi la corrente mentre si riscalda. Nelle costruzioni reali, questi resistori rendono anche più semplice anticipare il comportamento di guasto, il che può separare un sovraccarico recuperabile da un guasto a cascata che porta via più parti contemporaneamente.
Controllo della Polarizzazione, Distorsione di Crossover e Tracciamento Termico
Le fasi di classe AB dipendono da un bias che rimane stabile abbastanza da mantenere bassa la distorsione da incrocio senza rischiare il surriscaldamento. I circuiti di bias compensati per la temperatura e la disposizione fisica, il accoppiamento termico con il dissipatore di calore o con i dispositivi controllati, spesso contano tanto quanto lo schema stesso. Un reclamo frequente sul campo è la deriva del bias dopo il riscaldamento; i progetti che si sentono “stabili” dopo ore tendono a trattare i percorsi termici come qualcosa da ingegnerizzare deliberatamente, non semplicemente da assumere.
Protezione: Limitazione della Corrente, Sicurezze SOA e Gestione dei Guasti
Cortocircuiti, avvallamenti a bassa impedenza e correnti reattive possono spingere i dispositivi al di fuori della loro area operativa sicura (SOA). Gli amplificatori pratici spesso aggiungono limitazione della corrente, protezioni consapevoli della SOA e talvolta un comportamento di ripiegamento per mantenere lo stress contenuto durante un abuso prolungato. Le implementazioni più avanzate cercano di non intervenire durante picchi musicali legittimi, rispondendo in modo deciso quando un sovraccarico persiste. Un controllo della realtà che molti team apprendono a loro spese è che i circuiti di protezione che “non si attivano mai” nei test potrebbero semplicemente non essere mai stati esercitati in configurazioni di guasto realistico.
Alimentazione (Stoccaggio di Energia, Domanda di Picco e Comportamento della Alimentazione)
L'alimentazione è più di un fornitore di DC; diventa parte dell'ambiente del segnale attraverso la modulazione della linea, correnti di terra e risposta transitoria. Quando un amplificatore potente è abbinato a un'alimentazione che non riesce a mantenere la calma, il risultato può essere un carattere teso nei picchi e meccanismi di distorsione difficili da individuare con test in regime stazionario. Il comportamento dell'alimentazione è spesso monitorato con la stessa attenzione del percorso del segnale per mantenere prestazioni costanti in diverse condizioni di rete.
Capacità del Trasformatore/SMPS e Consegna di Potenza di Picco
Che l'alimentazione sia lineare (trasformatore + raddrizzatore) o basata su SMPS, deve tollerare brevi esplosioni di alta corrente senza eccessivo affondamento o attivazioni di protezione indesiderate. Molti progetti sono dimensionati attorno alle richieste di picco piuttosto che alle medie, perché la musica e il materiale programmatico reale raramente si comportano come onde sinusoidali continue. I lavori in laboratorio e le sessioni di ascolto rivelano spesso che la rigidità della linea durante i transienti influisce sulla facilità percepita più di quanto suggeriscano le dichiarazioni di watt nominali.
Capacità di Riserva, Controllo del Ripple e Ritorni di Terra
La capacità totale riduce il ripple e fornisce energia locale per i picchi, ma la disposizione fisica e il percorso di ritorno plasmano se quell'energia arriva pulita. I picchi di carico ad alta corrente e le correnti di ritorno degli altoparlanti non dovrebbero condividere gli stessi percorsi di riferimento sensibili utilizzati dallo stadio di ingresso. Molti problemi di ronzii e fruscii possono essere ricondotti a un layout che è elettricamente corretto in forma schematica ma trascurato riguardo alla mappa reale della corrente di ritorno, un problema che può essere stranamente soddisfacente da risolvere una volta identificato, e profondamente fastidioso prima di esserlo.
Affondamento della Linea, Strategia di Regolazione e Conseguenze Termiche
L'affondamento della linea influisce sul margine disponibile e può spostare i punti di bias, a volte in modi che cambiano il comportamento della distorsione sotto carico. Alcuni progetti accettano un modesto affondamento come una forma di limitazione morbida, mentre altri perseguono una regolazione più rigorosa per dinamiche costanti. Una preferenza pratica è per un affondamento che sia consistente e facile da prevedere, perché rende il comportamento termico e la variazione delle prestazioni più gestibili attraverso il cambiamento della tensione della rete e della temperatura ambientale.
Controllo, Monitoraggio e Funzioni di Affidabilità a Livello di Sistema
Man mano che la potenza in uscita aumenta, i circuiti di protezione e supporto diventano più importanti per l'affidabilità del sistema. Questi circuiti aiutano a proteggere gli altoparlanti, ridurre i danni all'amplificatore e abbassare i problemi di servizio difficili. Le caratteristiche di protezione stabili aiutano anche a ridurre i guasti imprevisti durante il funzionamento a lungo termine.
Protezione degli Altoparlanti
Relè di uscita o disconnessioni a stato solido riducono l'esposizione a guasti DC, transitori di accensione/spegnimento e alcune modalità di guasto. Le scelte di temporizzazione, il comportamento di contatto (per i relè) e le soglie di rilevamento dei guasti influenzano come la protezione si percepisce nell'uso reale. Molti guasti degli altoparlanti derivano da eventi anomali, cicli di potenza, cablaggio intermittente o un singolo dispositivo che fallisce bruscamente, quindi un comportamento di disconnessione che è veloce e affidabile tende a ripagare con meno disastri una tantum.
Rilevamento della Temperatura, Regolazione del Bias e Spegnimento
Termistori, sensori di temperatura e schemi di moltiplicatore Vbe aiutano a monitorare la temperatura e ridurre la possibilità di esecuzione termica. Lo spegnimento termico può prevenire esiti catastrofici quando il flusso d'aria è bloccato o la temperatura ambientale sale oltre le aspettative. La disposizione dei sensori conta più di quanto le persone vogliano inizialmente: misurare il nodo termico sbagliato può creare un'uscita confortante mentre il vero punto caldo continua a salire.
Blocchi Specifici della Classe D
Gli amplificatori di Classe D introducono un comportamento di commutazione, quindi il design inizia a sembrare simile a un lavoro RF a segnale misto, anche quando l'obiettivo è audio. Il successo qui spesso deriva dall'essere realistici riguardo al comportamento elettromagnetico in anticipo, piuttosto che sperare che possa essere corretto dopo il primo test EMI.
Interazione del filtro LC di uscita e del carico
Il filtro LC di uscita ricostruisce l'audio dall'onda quadra PWM e deve rimanere stabile anche con la variazione dell'impedenza degli altoparlanti. Le tolleranze dei componenti, le caratteristiche di saturazione e la dipendenza dal livello di potenza si manifestano ai limiti delle prestazioni. Un flusso di lavoro pragmatico è progettare attorno a carichi ostili e poi verificare utilizzando cavi e altoparlanti reali, perché ad alta frequenza il filtro e il cablaggio si comportano come un sistema accoppiato con la propria personalità.
Controllo EMI: Layout, schermatura, tassi di cambiamento e conformità
Il controllo EMI è fortemente influenzato dalla disciplina del layout: ridurre l'area di loop, gestire i percorsi con alta di/dt e modellare i tempi di salita/fallimento affinché l'energia di commutazione sia meno aggressiva. La modulazione a spettro allargato e i snubber possono essere strumenti utili, ma raramente compensano loop di commutazione grandi e male costretti. Un'osservazione ricorrente da parte dei gruppi che superano la conformità senza problemi è che il cablaggio viene trattato come un lavoro RF fin dalla prima decisione di posizionamento, piuttosto che essere "ripulito" alla fine.
Un modo produttivo per affrontare un amplificatore di potenza è affrontare la stabilità, il percorso di corrente e il comportamento termico in anticipo, prima di spendere energia nel cercare piccole riduzioni della distorsione. Quando questi comportamenti sono risolti, un guadagno di loop più elevato, l'aggiornamento dei dispositivi e una compensazione raffinata tendono a tradursi in benefici che rimangono intatti attraverso altoparlanti e cablaggi diversi. Senza quelle basi, parti migliori possono esporre nuovi modi di guasto, specialmente con carichi reattivi e cavi reali imperfetti, e questo risultato è raramente soddisfacente quando arrivano i primi rapporti di campo.
Indicatori chiave di prestazione
Specifiche tecniche
Le specifiche degli amplificatori diventano più facili da fidarsi quando sono ancorate a condizioni di test ripetibili e ai confini fisici del circuito. Quando leggo una scheda tecnica, mi sento più sicuro quando la potenza nominale è indicata come potenza continua RMS in un carico definito, con limiti di test che non lasciano spazio per interpretazioni. Senza quelle condizioni, la misurazione può ancora essere corretta, ma diventa meno utile per il funzionamento nel mondo reale.
La segnalazione della potenza RMS tende ad essere più interpretabile quando indica chiaramente la configurazione della misurazione. Una valutazione che sembra modesta ma si mantiene stabile per minuti di solito si allinea meglio a come le persone ascoltano effettivamente, specialmente quando la stanza è calda, la musica è densa e la sessione dura più a lungo di una rapida demo. Al contrario, la potenza musicale o le valutazioni a breve scossa possono apparire impressionanti evitando gli effetti a lungo termine della caduta di tensione dell'alimentazione e dell'accumulo di calore all'interno del telaio.
Condizioni di prova della potenza RMS che rendono la valutazione comparabile:
• Impedenza del carico (ad es., 8 Ω, 4 Ω)
• Larghezza di banda (ad es., 20 Hz–20 kHz)
• Limite di distorsione alla valutazione (ad es., 0,1% THD)
• Condizione di pilotaggio del canale (ad es., entrambi i canali pilotati per unità stereo)
La distorsione armonica totale (THD) è uno strumento rozzo, eppure fornisce ancora una reale comprensione quando viene letta con contesto. Un valore di THD molto basso a 1 kHz indica spesso un forte guadagno di loop e una buona linearità, ma trovo più rivelatore vedere come si muove il THD quando la frequenza aumenta, quando il livello di uscita si avvicina al limite superiore della gamma e quando il carico diventa meno amichevole. Quei cambiamenti sono spesso dove appare la personalità di un amplificatore, non come linguaggio di marketing, ma come comportamento ingegneristico che puoi prevedere.
Cause comuni di aumento del THD nelle misurazioni reali:
• Crescita del THD ad alta frequenza che suggerisce larghezza di banda limitata in open-loop
• Scelte di compensazione che scambiano velocità per stabilità
• Non linearità dello stadio di uscita quando i dispositivi si scambiano la corrente
• Spettri di distorsione dominati da componenti di ordine superiore, che possono suonare più acuti quando spinti
Il tasso di salita stabilisce un limite su quanto velocemente può cambiare la tensione di uscita, e quel limite si manifesta più chiaramente sui transienti. Quando il tasso di salita esaurisce, il risultato udibile non è sempre un’addolcimento gentile; può creare prodotti di intermodulazione transitoria che si riversano nella banda udibile. Quel mismatch, che si misura in modo pulito su toni stabili ma suona congestionato su passaggi complessi, tende a frustrate gli ascoltatori perché sembra incoerente: l'amplificatore sembra a posto finché la musica non diventa frenetica.
Fattori di design che influenzano comunemente il margine di manovra del tasso di salita:
• Capacità di corrente dello stadio di ingresso
• Valori dei condensatori di compensazione
• Carico capacitivo efficace proveniente dall'alto-parlante e dai cavi
Un modo pratico di pensare a questo è osservare come si comporta l'amplificatore con transitori bruschi ad alto livello su un altoparlante difficile. Le unità con margine adeguato spesso mantengono intatti i dettagli senza diventare fragili, perché non vengono costrette in un comportamento di recupero.
Il fattore di smorzamento è strettamente correlato all'impedenza di uscita e diventa particolarmente importante con carichi di altoparlanti reattivi e back-EMF del woofer. Una bassa impedenza di uscita può migliorare il controllo dell'altoparlante, ma il reale fattore di smorzamento ai terminali degli altoparlanti è anche influenzato da cavi, connettori e altri fattori esterni. Le valutazioni di fattore di smorzamento molto elevate potrebbero quindi non rappresentare completamente le condizioni operative reali.
Elementi del sistema che comunemente limitano il reale smorzamento al trasduttore:
• Resistenza del cavo dell'altoparlante
• Perdite da connettori/contatti
• Induttori di crossover e elementi in serie
• Ossidazione dei contatti nel tempo
Quindi, invece di considerare il fattore di smorzamento come un numero da vantare, si legge più come un indizio di robustezza: se l'amplificatore mantiene l'articolazione dei bassi e l'equilibrio tonale quando il cablaggio, i connettori e il posizionamento sembrano un normale sistema domestico piuttosto che un dispositivo da laboratorio controllato.
La capacità di impedenza del carico è uno dei controlli di stress più candidi perché costringe ogni sottosistema a cooperare tutti insieme. L'operazione con carichi di 4 Ω e 2 Ω e con carichi reattivi con angoli di fase ripidi dipende da come vengono gestiti i dispositivi di uscita, da come viene implementato il limitatore di corrente, da come viene monitorato il comportamento termico e da quanto rimane rigida l'alimentazione sotto carico. La principale preoccupazione non è solo se l'amplificatore funziona, ma se le prestazioni rimangono stabili e lineari vicino ai limiti operativi senza oscillazioni, clipping o riduzione termica che influiscono sulla qualità audio.
Sottosistemi che tipicamente determinano il comportamento con carichi difficili:
• Selezione dei dispositivi di uscita e gestione dell'area di funzionamento sicura
• Strategia di limitazione della corrente (come entra in funzione e quanto bruscamente)
• Rigidità dell'alimentazione sotto estrazione di corrente sostenuta
• Monitoraggio termico ed efficacia del dissipatore di calore
Nella pratica reale, ho notato un modello: i progetti con protezioni aggressive possono sembrare impressionanti al primo impatto, per poi diventare imprevedibili su materiale dinamico mentre la protezione interviene. I progetti con un monitoraggio termico più calmo e una gestione della corrente più elegante spesso si presentano come meno drammatici ma più coerenti, il che tende a corrispondere a ciò che i listener di lungo termine descrivono come più facile da vivere.
Metriche di prestazione
I confronti reggono solo quando gli standard di misurazione sono coerenti e quando la metrica si mappa effettivamente su risultati di ascolto ripetibili. Ho imparato a essere cauto con i confronti a un numero; possono essere emotivamente soddisfacenti, puliti, semplici, decisivi, mentre falliscono ancora nel prevedere come si comporta un amplificatore su altoparlanti reali in stanze reali.
La potenza RMS funziona bene come base perché riflette la capacità sostenuta. Le valutazioni di tipo burst come il PMPO descrivono principalmente quanto in alto possa salire un picco breve prima che l'alimentazione si riduca o la protezione intervenga. Quando si abbina un amplificatore agli altoparlanti, la domanda pratica diventa se può fornire corrente pulita durante veri cicli di lavoro senza comprimere silenziosamente la dinamica. Molte deludenti combinazioni "ad alta potenza" falliscono non perché il numero sia fabbricato, ma perché il design è stato sintonizzato per brevi momenti di spettacolo piuttosto che per lunghe sessioni di ascolto a livelli realistici.
Motivi comuni per cui le combinazioni "ad alta potenza" non soddisfano nella pratica:
• Alimentazione ottimizzata per brevi dimostrazioni, non per estrazione sostenuta
• Dissipatore di calore dimensionato per medie che non corrispondono all'uso reale
• Limitazione della corrente che si attiva precocemente sui picchi a bassa impedenza
La risposta in frequenza oltre la banda udibile non è molto interessante come trofeo. Diventa genuinamente utile quando riduce il cambiamento di fase udibile, preserva il timing dei transitori e mantiene un comportamento di feedback prevedibile nell'intera banda audio. Ciò che cerco non è solo una risposta dell'ampiezza piatta, ma una stabilità del margine di fase sotto carico, perché quella stabilità tende a correlarsi con un'imaging coerente e meno artefatti presenti solo su alcune registrazioni.
Caratteristiche che spesso separano i progetti a larga banda che si comportano bene da quelli che non lo fanno:
• Comportamento stabile del loop quando si guida la capacità e l'induttanza
• Larghezza di banda che non collassa quando viene richiesta corrente reale dagli altoparlanti
• Tolleranza al carico che evita artefatti ad alta frequenza sottili derivanti da stabilità marginale
Il rapporto segnale-rumore (SNR) descrive quanto è silenzioso l'amplificatore rispetto all'uscita massima, ma il dato diventa significativo solo quando il peso e il livello di riferimento sono specificati. Superare i 100 dB nei prodotti reali riflette generalmente più di uno stadio di ingresso silenzioso; riflette una struttura di guadagno disciplinata, binari puliti, messa a terra riflessiva e scelte di layout che riducono il accoppiamento magnetico e mantengono il rumore di commutazione lontano dai nodi sensibili. Qui spesso mi sento un po' diffidente: la specifica può apparire impeccabile, eppure il sistema installato può ancora frusciare o ronzare se la distribuzione del guadagno e la messa a terra sono scadenti.
Fattori di design e integrazione che influenzano fortemente il rumore nel mondo reale:
• Staging del guadagno tra sorgente, preamplificatore e amplificatore
• Pulizia dei binari di alimentazione e strategia del regolatore
• Approccio di messa a terra che evita i loop di ronzio
• Pratiche di layout che riducono il accoppiamento e l'ingresso di RF
• Esposta ai bordi di commutazione in configurazioni Class D e miste digitali/analogiche
Una lezione ricorrente nel mondo reale è che un amplificatore che misura silenzioso in isolamento può diventare rumoroso in un sistema completo se il cablaggio e la messa a terra invitano le correnti di loop. Quindi, una mentalità KPI di solito si estende oltre il pavimento di rumore interno e in come il design è tollerante al cablaggio normale e ai tipici dispositivi sorgente.
Un filo unisce queste metriche: i KPI sono più utili quando prevedono il comportamento sotto stress realistico, non solo toni di test ideali. Gli amplificatori che tendono a soddisfare nel tempo sono raramente quelli che "vincono" una singola specifica di copertura; sono quelli le cui misurazioni rimangono coerenti attraverso frequenza, livello di uscita, temperatura e carico, e il cui comportamento di protezione transita in modo fluido piuttosto che sbalzare il sistema in un cambiamento udibile. Questo è il punto in cui le specifiche smettono di sembrare marketing e iniziano a leggere come evidenze ingegneristiche.
Implementazione dell'Amplificatore di Potenza nel 2026
Nel 2026, gli amplificatori di potenza (PA) raramente si comportano come un blocco finale autonomo che può essere ottimizzato in isolamento. Stabilizzano sempre più il tono della fattibilità del sistema perché l'efficienza quotidiana, la linearità reale, il drift termico e il tempo necessario per calibrare e mantenere le unità allineate si riflettono tutti in costo, pressione di programma e prestazioni sul campo. Ciò che molte squadre percepiscono sul campo è un cambiamento in cui sorgono i problemi: un PA può sembrare convincente su un banco di prova controllato, per poi rivelare casi limite scomodi una volta imballato, accoppiato alle antenne e sottoposto a stress e variazioni simili alla produzione. Di conseguenza, le implementazioni trattano comunemente il PA come un elemento co-progettato insieme all'interfaccia dell'antenna, alla fornitura di energia e alla correzione software, con piani di validazione che presumono che l'hardware si comporti in modo diverso una volta lasciato il laboratorio.
Infrastruttura 5G/6G
I moderni radio 5G e 6G utilizzano amplificatori RF di potenza per ciascun elemento dell'antenna in sistemi massive MIMO. Questo sostituisce un grande amplificatore di potenza con molti amplificatori distribuiti più piccoli che operano sotto rigidi limiti termici e normativi. La trasmissione di segnale pulito durante la modulazione ad alta punta deve essere mantenuta mentre si riduce la perdita di potenza durante le normali condizioni operative.
Linearità sotto modulazione ad alta PAPR
L'OFDM a banda larga generalmente genera un alto rapporto di potenza di picco a media (PAPR). Questa realtà costringe i PA a sopportare picchi elevati senza trasformarli in rigenerazione spettrale che fallisce le maschere o degrada la perdita di canale adiacente. Ciò che tende a rendere inquieti i team è che la conformità non è una singola misurazione a temperatura ambiente: le prestazioni devono rimanere prevedibili attraverso escursioni di temperatura, invecchiamento del dispositivo e cambiamenti di carico guidati dal accoppiamento dell'antenna, interazioni dell'involucro e movimenti ambientali. Nella pratica, il lavoro sulla linearità diventa un esercizio multi-condizione, non un obiettivo a numero singolo.
Efficienza a punti operativi realistici
Le stazioni base e i radio raramente rimangono a un'uscita di picco continua. Trascorrono lunghe porzioni di tempo a livelli inferiori, dove molti design classici di PA perdono rapidamente efficienza. Man mano che le array si espandono, l'efficienza media inizia a dominare le preoccupazioni operative perché influenza i budget di raffreddamento, la spesa energetica e il margine di affidabilità a lungo termine. Molte implementazioni quindi giudicano le tecniche di efficienza in base a come si comportano nella regione ridotta sotto programmazione e modelli di traffico realistici, anche se ciò è meno glamour che citare numeri di picco.
Schemi di Implementazione: Mischiare Architettura e Algoritmi per Gestire i Compromessi
I design infrastrutturali mainstream combinano tipicamente le scelte architettoniche del PA con la correzione basata su software in modo che linearità ed efficienza possano coesistere senza trasformare la produzione in una maratona di calibrazione.
Tecniche architettoniche e algoritmiche sono
spesso combinate nei radio 5G/6G:
• Modulazione del carico in stile Doherty
• Tracciamento dell'involucro (modulazione di alimentazione)
• Predistorsione digitale (DPD) con strategie di calibrazione consapevoli della produzione
I PA in stile Doherty continuano ad essere ampiamente impiegati principalmente perché sostengono un'efficienza più forte nella regione di attenuazione in cui risiedono i segnali ad alta PAPR. Ciò che i team esperti monitorano non è la bellezza della curva simulata, ma se il vantaggio sopravvive alla variazione del dispositivo, alla deriva del bias e al movimento dell'impedenza. Un design può apparire eccezionale su un banco di prova attentamente sintonizzato, per poi perdere silenziosamente il suo vantaggio quando entrano in gioco il disallineamento dell'antenna, gli effetti di imballaggio e i gradienti termici dell'involucro. Per questo motivo, molti programmi tendono a orientarsi verso un comportamento di modulazione del carico robusto che rimane stabile tra le unità, anche se ciò significa rinunciare a un po' delle prestazioni ottimali che appaiono solo sotto una sintonizzazione ideale.
Il tracking dell'inviluppo riduce il margine di tensione sprecato spostando l'alimentazione con l'ampiezza del segnale. Il vincolo reale è come si comporta il loop di controllo quando il prodotto viene spinto: il ritardo può gonfiare la distorsione, mentre un tracking eccessivamente aggressivo può invitare a artefatti indotti dall'EMI e dall'alimentazione che richiedono tempo per essere isolati. In pratica, i team preferiscono spesso un profilo di tracking che sia più facile da caratterizzare e riprodurre attraverso la variazione di produzione, perché riduce l'ansia di sorprese in fase avanzata e accorcia i cicli di validazione.
Il DPD è comunemente utilizzato in parallelo per linearizzare il PA, ma le implementazioni del 2026 pongono un'attenzione insolitamente acuta sul comportamento della calibrazione sul campo, non solo sulla sofisticazione del modello. I programmi scoprono frequentemente che la "tassa nascosta" non è il calcolo, ma la gestione dei coefficienti e la ripetibilità tra le flotte.
Domande di calibrazione DPD che tendono a dominare le discussioni di implementazione:
• Aggiornamento della cadenza per i coefficienti attraverso la temperatura e l'invecchiamento
• Metodi di calibrazione in servizio che evitano interruzioni del traffico
• Gestione degli effetti di memoria e del comportamento dipendente dalla temperatura senza una sintonizzazione fragile
Una lezione di implementazione ricorrente è che il tempo di calibrazione, il rischio di rifacimento e la ripetibilità da unità a unità possono decidere se una scelta di PA risulti fluida o dolorosa in produzione. Di conseguenza, le opzioni di PA vengono sempre più selezionate per la loro capacità di cooperare graziosamente con DPD stabili e a basso contatto piuttosto che essere giudicate solo da metriche isolate del dispositivo.
A mmWave, l'estrazione del calore e le parasitiche dominano spesso i risultati. Approcci sintonizzati armonicamente come il Classe F e l'inverso-F sono utilizzati per modellare forme d'onda di tensione e corrente per ridurre la dissipazione legata alla sovrapposizione. Il complicato è che le parasitiche del layout mmWave, le transizioni di imballaggio e le discontinuità di interconnessione possono spostare le impedenze armoniche abbastanza da erodere i guadagni teorici. I design che resistono meglio trattano la sintonizzazione armonica come una disciplina di sistema: le scelte di layout, le reti passive, l'imballaggio e l'interfaccia dell'antenna sono trattate come parte dello spazio di design del PA piuttosto che come lavoro di ripristino alla fine.
Un punto di vista che risuona nei team di infrastruttura è che il lavoro del PA mmWave riguarda meno la scoperta di una singola "classe ideale" e più il mantenimento del controllo della varianza. L'hardware che rimane entro le specifiche su molte unità, in più ambienti e con una minima ritocco tende ad essere l'hardware che vince la fiducia nell'implementazione.
Veicoli Elettrici

Nei veicoli elettrici, gli amplificatori si trovano nel percorso delle funzioni che i clienti notano immediatamente e delle funzioni che i regolatori scrutano sempre più. Vivono anche in un ambiente elettrico che sembra inesorabile rispetto all'elettronica di consumo: transitori, rilascio di tensione, offset di terra e ampie oscillazioni di temperatura sono condizioni operative normali piuttosto che casi isolati. Ciò tende a spingere le conversazioni di design lontano dalle specifiche audio di primo piano e verso un comportamento prevedibile attraverso eventi del veicolo reale.
AVAS (Sistemi di Allerta Acustica dei Veicoli)
L'AVAS è giudicato in base a se i pedoni possono riconoscere costantemente la presenza del veicolo. Ciò orienta i requisiti del PA verso un'uscita acustica costante e modalità di guasto controllate piuttosto che inseguire il volume di picco.
Le aspettative del PA guidate dall'AVAS includono comunemente:
• Guadagno e risposta in frequenza stabili attraverso la temperatura
• Comportamento di clipping prevedibile affinché le firme di allerta rimangano riconoscibili
• Tolleranza al rilascio di tensione e ai transitori della linea tipici dei sistemi di alimentazione automobilistica
I programmi dei veicoli spesso trovano un gap scomodo tra le misurazioni del banco e il comportamento in-veicolo. Un PA che appare pulito su un'alimentazione costante può comportarsi in modo diverso durante eventi di avviamento, scariche di carico o riferimenti di terra in movimento. I design che includono limitazioni protettive, un comportamento di recupero ben caratterizzato e margine di sicurezza conservativo tendono a ridurre il churn di sintonizzazione in fase finale e l'incertezza di conformità.
ANC (Cancellazione Attiva del Rumore)
L'ANC dipende da una bassa latenza e da una risposta di fase costante poiché l'amplificatore partecipa al loop di controllo. Questo rende la larghezza di banda, la stabilità del ritardo di gruppo e il livello di rumore rilevanti in modi che un semplice test audio potrebbe non rivelare. Molti team apprendono, a volte nel modo più difficile, che un singolo numero di THD a 1 kHz non predice quanto bene un loop ANC manterrà la profondità di cancellazione nel tempo e con la temperatura.
I vincoli PA orientati all'ANC si presentano spesso come:
• Larghezza di banda ampia con un comportamento di fase che rimane costante attraverso la banda di cancellazione
• Basso rumore e bassa distorsione a livelli di uscita modesti in cui l'ANC opera comunemente
• Prestazioni stabili attraverso variazioni di temperatura e di alimentazione poiché piccole variazioni di fase possono erodere la cancellazione
Ciò che tende a separare i progetti ANC di successo è come si comporta l'amplificatore in loop: stabilità di fase, linearità del segnale debole e latenza ripetibile in condizioni operative reali, non solo misurazioni isolate che sembrano buone.
Noduli RF alimentati a batteria e IoT
Nei dispositivi IoT, indossabili e nodi RF alimentati a batteria, lo sforzo ingegneristico si concentra sull'efficienza energetica a potenze di trasmissione basse e moderate. Gli amplificatori RF a modalità di commutazione, in particolare le famiglie di Classe E e Classe F, sono frequentemente scelti perché la modellazione dell'onda può ridurre la sovrapposizione tra tensione di drenaggio e corrente. Tuttavia, in molti piccoli prodotti, la frustrazione è che il transistor è raramente l'unico limite; i dettagli di implementazione spesso pongono un tetto.
Sintonizzazione armonica nella pratica
Queste architetture si basano su reti di sintonizzazione armonica per imporre impedenze target al fondamentale e agli armonici. Nella pratica, le perdite e la variabilità derivano spesso dall'implementazione circostante piuttosto che dal dispositivo attivo stesso.
Colli di bottiglia di implementazione comuni:
• Q dei componenti e tolleranza, specialmente in piccoli induttori e condensatori
• Parassitici della PCB, induttanza via e qualità del ritorno a terra
• Variazione della corrispondenza dell'antenna tra le unità e variazioni causate dalla manipolazione da parte dell'utente
Un takeaway pratico su cui molti team arrivano, a volte con un po' di rammarico, è che l'efficienza è spesso "spesa" nella rete di corrispondenza e nell'interconnessione prima di essere mai persa nel transistor. I programmi che investono presto nella co-simulazione EM, nella disposizione con impedenza controllata e in strategie di corrispondenza robuste spesso consegnano prodotti con una durata della batteria più consistente rispetto ai programmi che si concentrano principalmente sulla selezione di un dispositivo ad alte prestazioni.
Co-progettazione a livello di sistema
I prodotti alimentati a batteria devono comunque soddisfare i limiti di emissione e i requisiti di coesistenza. Gli amplificatori di commutazione possono generare armoniche e spur quando le terminazioni armoniche si spostano a causa di variazioni di produzione o detuning dell'antenna. I progetti più affidabili trattano l'interfaccia dell'antenna come un carico variabile e progettano per tolleranza piuttosto che per perfezione. In molti prodotti commercializzati, i team accettano una leggera diminuzione dell'efficienza di picco per ottenere un comportamento spettrale più prevedibile in condizioni di manipolazione reale, effetti di alloggiamento e variazioni tra le unità.
In tutte le infrastrutture, automobilistico e IoT, il successo degli amplificatori di potenza segue sempre più quanto sia controllabile e ripetibile il comportamento, piuttosto che quanto sembri impressionante un singolo valore di picco isolato. Tecniche come il funzionamento Doherty, il tracciamento dell'involucro e la sintonizzazione armonica offrono i loro benefici solo quando rimangono stabili attraverso variazioni di temperatura, disadattamenti, dispersioni di processo e invecchiamento. I progetti di distribuzione più competitivi del 2026 tendono a abbinare il design RF con la gestione dell'alimentazione e la correzione software, mentre tendono verso approcci che mantengono il lavoro di calibrazione prevedibile e riducono le probabilità di sorprese tardive nel sistema.
Conclusione
Le prestazioni dell'amplificatore di potenza dipendono da molto più della potenza di uscita da sola. Un funzionamento stabile richiede un attento controllo della polarizzazione, del feedback, del comportamento termico, dell'interazione con il carico e delle prestazioni dell'alimentazione. I diversi progetti di amplificatori bilanciano efficienza, linearità e affidabilità in modi diversi a seconda dell'applicazione. Man mano che i sistemi moderni richiedono una maggiore densità di potenza e efficienza, il design degli amplificatori di successo si basa sempre più sul mantenimento di prestazioni prevedibili in condizioni operative reali.
Domande Frequenti (FAQ)
1. Perché le prestazioni degli amplificatori di potenza dipendono fortemente dall'alimentazione piuttosto che solo dal circuito dell'amplificatore stesso?
Un amplificatore di potenza non crea energia di uscita direttamente dal segnale di ingresso. Invece, l'onda di ingresso controlla quanta energia viene prelevata dalle linee di alimentazione CC e consegnata al carico. A causa di ciò, la stabilità dell'alimentazione influisce fortemente sul comportamento dell'amplificatore durante il funzionamento difficile. Una regolazione debole dell'alimentazione, il calo delle linee, la scarsa messa a terra o la consegna di corrente insufficiente possono ridurre le prestazioni dinamiche, aumentare la distorsione e creare instabilità durante condizioni di alta uscita. In molti progetti pratici di amplificatori, l'affidabilità a lungo termine dipende tanto dal comportamento dell'alimentazione e dalla gestione del ritorno di corrente quanto dai dispositivi attivi stessi.
2. Perché il comportamento termico è considerato una delle più grandi sfide nella progettazione di amplificatori di Classe A e Classe AB?
Gli amplificatori di Classe A e Classe AB dissipano continuamente calore perché i loro dispositivi di uscita rimangono parzialmente o completamente conduttivi anche in condizioni di inattività. Man mano che la temperatura interna aumenta, i punti di funzionamento dei transistor possono spostarsi, la corrente di polarizzazione può cambiare e il comportamento di distorsione può variare in modo imprevisto. La gestione termica diventa quindi un problema di progettazione a livello di sistema che coinvolge dissipatori di calore, flusso d'aria, accoppiamento termico, posizionamento dei sensori e monitoraggio della polarizzazione. Anche piccoli cambiamenti meccanici, come il riposizionamento di un sensore di polarizzazione o la modifica della pressione di contatto del dissipatore di calore, possono influenzare significativamente la stabilità a lungo termine e le prestazioni di distorsione.
3. Come migliora il feedback negativo la linearità dell'amplificatore introducendo anche preoccupazioni per la stabilità?
Il feedback negativo riduce la distorsione e stabilizza il guadagno in anello chiuso correggendo il comportamento non lineare all'interno dell'amplificatore. Tuttavia, man mano che aumenta la frequenza del segnale, lo spostamento di fase accumulato all'interno dell'anello di feedback può ridurre il margine di fase e potenzialmente creare risonanza o oscillazione. I carichi reattivi degli altoparlanti, i cavi lunghi e le capacità parassite complicano questo aspetto perché alterano la risposta dell'anello in condizioni operative reali. I progettisti utilizzano quindi reti di compensazione, circuiti di smorzamento e tecniche di layout accurato per bilanciare larghezza di banda, riduzione della distorsione e funzionamento stabile.
4. Perché i carichi reattivi degli altoparlanti sono molto più difficili per gli amplificatori rispetto ai semplici carichi resistivi?
I veri altoparlanti non si comportano come resistori fissi. La loro impedenza cambia con la frequenza e spesso contiene caratteristiche induttive e risonanti che spostano le relazioni di fase della corrente. Queste condizioni elettriche variabili costringono l'amplificatore a gestire un flusso di corrente complesso, una domanda transitoria rapida e un comportamento di feedback cangiante simultaneamente. Un amplificatore che appare stabile con un semplice resistore da laboratorio può diventare instabile, oscillare o distorcere pesantemente quando è collegato a altoparlanti reattivi e cavi lunghi.
5. Perché il controllo della polarizzazione è così importante nel ridurre la distorsione da crossover negli amplificatori di Classe AB?
Gli amplificatori di Classe AB riducono la distorsione da crossover permettendo a entrambi i dispositivi di uscita di condurre leggermente attorno alla regione di attraversamento dello zero. Se la corrente di polarizzazione diventa troppo bassa, appare una discontinuità durante il passaggio da un dispositivo all'altro, creando una distorsione da crossover udibile. Se la corrente di polarizzazione diventa troppo alta, la dissipazione di calore a riposo aumenta bruscamente e il rischio di runaway termico aumenta. I sistemi di polarizzazione efficaci utilizzano quindi circuiti di monitoraggio termico come i moltiplicatori Vbe e sensori posizionati con attenzione per mantenere condizioni operative stabili durante variazioni di temperatura e lunghe sessioni di ascolto.
6. Perché il layout del PCB diventa critico nei processori di alta efficienza di Classe D?
Gli amplificatori di Classe D commutano grandi correnti a velocità molto elevate, creando forti campi elettromagnetici e bordi transitori rapidi. Un layout del PCB scarso può aumentare l'induttanza parassita, l'EMI irradiata, il rumore di commutazione e l'interferenza del loop di massa. Piccoli errori di routing attorno ai circuiti di controllo del gate o ai percorsi di ritorno ad alta corrente possono trasformare un amplificatore altrimenti efficiente in una fonte di instabilità e problemi di emissione persistenti. Per questo motivo, il layout degli amplificatori di Classe D è spesso affrontato in modo simile alla progettazione dei sistemi RF piuttosto che alla progettazione audio a bassa frequenza convenzionale.
7. Come aiutano i sistemi di protezione dell'uscita a prevenire failure catastrofici degli amplificatori e degli altoparlanti?
I circuiti di protezione monitorano condizioni operative pericolose come offset DC, sovracorrente, surriscaldamento e transitori anomali all'accensione. Se appare una condizione di guasto, relè o sistemi di disconnessione a stato solido isolano l'altoparlante prima che la corrente dannosa raggiunga il carico. Questi circuiti sono particolarmente importanti perché molti guasti dell'amplificatore si verificano improvvisamente durante stress termico, cortocircuiti o condizioni operative instabili. I sistemi di protezione affidabili aiutano a prevenire danni costosi agli altoparlanti e riducono i guasti a cascata degli amplificatori durante il funzionamento anomalo.
8. Perché le specifiche di fattore di smorzamento elevate possono talvolta essere fuorvianti nei sistemi audio reali?
Il fattore di smorzamento riflette la relazione tra l'impedenza degli altoparlanti e l'impedenza di uscita dell'amplificatore, aiutando a descrivere quanto bene l'amplificatore controlla il movimento dell'altoparlante e gli effetti di contro-EMF. Tuttavia, il vero smorzamento visto dall'altoparlante è anche influenzato dalla resistenza dei cavi, dalla qualità dei connettori, dai componenti del crossover e dall'ossidazione dei contatti nel tempo. I numeri di fattore di smorzamento estremamente elevati misurati in condizioni di laboratorio potrebbero quindi non tradursi direttamente in differenze significative nel mondo reale una volta che vengono introdotti i cablaggi degli altoparlanti ordinari e le perdite di sistema.
9. Perché gli amplificatori di potenza moderni 5G e 6G si basano fortemente su tecniche come l'operazione Doherty, il tracciamento dell'inviluppo e la predistorzione digitale (DPD)?
I moderni sistemi di comunicazione wireless utilizzano schemi di modulazione con elevato rapporto di potenza di picco su potenza media (PAPR) che richiedono sia una forte efficienza che una linearità eccellente. Le architetture Doherty migliorano l'efficienza durante le condizioni di funzionamento ridotte, il tracciamento dell'inviluppo regola dinamicamente la tensione di alimentazione per ridurre la potenza sprecata e la DPD corregge la distorsione non lineare generata dall'amplificatore RF. Queste tecniche lavorano insieme per mantenere la qualità del segnale, ridurre la generazione di calore e soddisfare rigorose normative spettrali mentre supportano sistemi di comunicazione ad alta velocità di dati.
10. Perché il comportamento dell'amplificatore sotto condizioni di stress realistiche è spesso più importante delle specifiche isolate in laboratorio?
Molti amplificatori raggiungono specifiche impressionanti in condizioni di test controllate utilizzando carichi resistivi fissi, segnali di breve durata e alimentatori ideali. Tuttavia, il funzionamento nel mondo reale introduce accumulo di calore, carichi reattivi degli altoparlanti, effetti dei cavi, fluttuazioni di tensione, deriva di polarizzazione a lungo termine e picchi transitori ripetuti. Gli amplificatori che mantengono un comportamento prevedibile attraverso cambiamenti di temperatura, carichi difficili e funzionamento prolungato generalmente forniscono prestazioni più affidabili a lungo termine rispetto ai progetti ottimizzati principalmente per misurazioni benchmark isolate.
Blog correlato
-
Quanti zeri in un milione, miliardi di trilioni?
![Quanti zeri in un milione, miliardi di trilioni?]()
29/07/2024
Milioni rappresenta 106, una figura facilmente raggruppabile rispetto agli articoli di tutti i giorni o agli stipendi annuali. Miliardi, equivalenti a... -
Foglio dati MOSFET IRLZ44N, circuito, equivalente, pinout
![Foglio dati MOSFET IRLZ44N, circuito, equivalente, pinout]()
28/08/2024
L'IRLZ44N è un MOSFET di potere N-canale ampiamente utilizzato.Rinomato per le sue eccellenti capacità di commutazione, è molto adatto per numerose... -
Temperatura della batteria troppo bassa, la ricarica si è fermata.Come risolverlo?
![Temperatura della batteria troppo bassa, la ricarica si è fermata.Come risolverlo?]()
06/10/2024
I problemi di ricarica della batteria del telefono cellulare sono comuni ma possono essere gestiti efficacemente.La temperatura svolge un ruolo import... -
BC547 Guida completa del transistor
![BC547 Guida completa del transistor]()
04/07/2024
Il transistor BC547 è comunemente usato in una varietà di applicazioni elettroniche, che vanno dagli amplificatori di segnale di base a circuiti di ... -
Guida completa al SCR (raddrizzatore controllato al silicio)
![Guida completa al SCR (raddrizzatore controllato al silicio)]()
22/04/2024
I rettificatori controllati al silicio (SCR), o tiristi, svolgono un ruolo fondamentale nella tecnologia elettronica di potenza a causa delle loro pre... -
LR621, SR621SW, 364, Equivalenti della batteria AG1 e sostituzioni
![LR621, SR621SW, 364, Equivalenti della batteria AG1 e sostituzioni]()
15/07/2024
Le batterie del pulsante LR621 e SR621SW sono prevalenti in dispositivi elettronici compatti come orologi, piccoli giocattoli, calcolatori e chiavi re... -
Fondamenti di circuiti di amplifica operatoria
![Fondamenti di circuiti di amplifica operatoria]()
28/12/2023
Nell'intricato mondo dell'elettronica, un viaggio nei suoi misteri ci porta invariabilmente a un caleidoscopio di componenti del circuito, sia squisit... -
Confrontare le differenze e le applicazioni di NMOS e PMO
![Confrontare le differenze e le applicazioni di NMOS e PMO]()
15/11/2024
Comprendere le differenze tra i transistor NMOS e PMOS è importante nella progettazione di circuiti efficienti.NMOS (metallo-ossido-semiconduttore di... -
Una guida completa ai multiplexer e il loro ruolo nei sistemi digitali
![Una guida completa ai multiplexer e il loro ruolo nei sistemi digitali]()
20/09/2025
I multiplexer sono componenti nei sistemi digitali, progettati per incanalare più segnali di input in una singola linea di output utilizzando segnali... -
CR2450 vs CR2032 Confronto: tutto ciò che devi sapere
![CR2450 vs CR2032 Confronto: tutto ciò che devi sapere]()
15/09/2025
Batterie per bottoni come CR2450 e CR2032 alimentano molti elettronici quotidiani, da orologi e telecomandi ai dispositivi medici e industriali.Sebben...










Parti calde
- GRM188R72A391KA01D
- ST3243BPR
- TMJ107BB7104MAHT
- MPIC2131F
- AVL1108EGA
- DM74LS573N
- TF-208DG
- IS64LPS12832A-200TQLA3
- LT1236AIS8-5#PBF
- T495D685K050ATE190
- RT1206BRE0724KL
- BQ20Z70PWR-V110
- EL7535IY
- AD585SQ
- GRM3166S1H120JZ01D
- CC0402GRNPO9BN221
- TC35605XB-001
- HY57V161610ATC-10
- MT29F1T08CUCCBH8-6ITR:C
- LM21212MH-2
- S1D13774B01B11B
- R3047TC28K
- 2N7002K-T1-E3
- B05B-PASK-1(LF)(SN)
- GRM0335C2A5R7CA01D
- C8051F326-GM
- PI5C3253Q
- BC358239A-ANN-E4
- STM32L431RBT6
- CL21C2R4CBANNNC
- CL31A476KQHNNNE
- WM8941ECS/RV
- ML03511R8BAT2A
- CD4001BPWRG4
- ADT7318ARQZ
- XCR3032A-10VQ44C
- NCP1117DT33RKG
- VE-2N3-CV
- T491B475K016AH2478
- TDF8599BTH/N1CS
- T491D476K016AG48527280
- T491D336K010AT4802
- CY284120XC
- HA3089-I/SO
- S3C2410A26-YO8N
- SM89S16R1L25JP
- TC62D517XBG
- NCV8412ASTT1G
- LTC2421IMSTRPBF
- DS17485S-5+T&R