- Italia
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
Sensori tattili nella robotica: funzioni, tipi, evoluzione e applicazioni
Catalogo
Ruoli fondamentali riformulati dei sensori tattili
I sensori tattili sono generalmente compresi attraverso due ruoli strettamente legati: rilevamento e riconoscimento. Il rilevamento si occupa del primo livello di informazioni relative al tatto, mentre il riconoscimento estende queste informazioni in un'interpretazione strutturata. Insieme, definiscono come un sistema percepisce il contatto, interpreta l'interazione fisica e supporta decisioni di controllo successive.
Rilevamento: Il primo livello della percezione tattile
Il rilevamento riguarda l'acquisizione diretta di segnali relativi al contatto. In questa fase, il sistema determina se il contatto è avvenuto e raccoglie informazioni fisiche misurabili da quell'interazione.
I contenuti tipici del rilevamento includono:
• occorrenza del contatto
• magnitudine della forza applicata
• posizione di contatto
• comportamento di movimento o scivolamento
• caratteristiche superficiali come rigidità, texture e rugosità
A prima vista, questo può sembrare un compito di rilevamento semplice. Tuttavia, in contesti ingegneristici reali, il rilevamento è raramente così netto. Un sensore può rispondere rapidamente, ma generare comunque output instabili, e quel tipo di incoerenza spesso crea più frustrazione di una modesta riduzione nella sensibilità. Ciò che di solito guadagna fiducia nella pratica non è una reattività esagerata, ma un comportamento ripetibile in condizioni di contatto reali.
Il rilevamento costituisce il primo collegamento tra interazione fisica e interpretazione della macchina. Quando un sistema robotico tocca un oggetto, il primo passo è convertire il contatto meccanico in segnali elettrici che possono essere misurati e elaborati.
Questo processo include spesso:
• rilevamento della magnitudine della forza
• mappatura della distribuzione della pressione
• localizzazione del contatto
• tracciamento di eventi dinamici
Se inizia lo scivolamento, ci si aspetta che il sensore registri sottili cambiamenti legati all'attrito prima che l'oggetto sfugga effettivamente al controllo. Se la superficie contattata è irregolare, il processo di rilevamento dovrebbe separare le protuberanze isolate dalla texture continua e distinguere entrambi dalla struttura più ampia legata alla durezza. Nella distribuzione reale, i sistemi che funzionano bene non sono semplicemente quelli che raccolgono più variabili; sono quelli che catturano le variabili più rilevanti con un livello di precisione che serve davvero al compito.
Nella fase di rilevamento, i sensori tattili catturano solitamente diversi tipi di informazioni fisiche:
Questi includono comunemente:
• esistenza del contatto
• forza di contatto
• posizione di contatto
• movimento e scivolamento
• proprietà superficiali come rigidità, compliance e rugosità
L'esistenza del contatto è il segnale più basilare, eppure porta un notevole valore pratico nell'inizio della comprensione e nelle risposte legate alla sicurezza. La forza di contatto indica se l'interazione rimane delicata, controllata o eccessiva. La posizione di contatto rivela come il carico è distribuito nella regione sensoriale. Il movimento e lo scivolamento mostrano se l'oggetto rimane sicuro o inizia a muoversi rispetto alla superficie del sensore. Le proprietà della superficie aggiungono un ulteriore livello di giudizio, offrendo indizi sulle condizioni del materiale e su quanto cautamente l'oggetto deve essere maneggiato.
Negli ambienti applicati, i segnali di rilevamento grezzo raramente appaiono in forma ordinata o completa. Vibrazione minore, carico irregolare, deriva di temperatura e angoli di contatto variabili distorcono frequentemente l'output.
Le comuni fonti di disturbo del segnale includono:
• piccole vibrazioni meccaniche
• carico irregolare
• deriva di temperatura
• angolo di contatto variabile
Durante la manipolazione ripetuta, anche due contatti applicati con quasi la stessa forza possono ancora produrre curve di risposta leggermente diverse. Questa è un'osservazione familiare e a volte frustrante nel lavoro tattile, specialmente quando le aspettative di laboratorio incontrano la variabilità fisica. Per questa ragione, un rilevamento affidabile dipende non solo dalla sensibilità dell'hardware, ma anche dalla strategia di calibrazione e dall'interpretazione consapevole del tempo. In molti casi, il rilevamento costante in condizioni imperfette porta più valore pratico rispetto a una sensibilità ideale dimostrata solo in esperimenti controllati.
Riconoscimento: Interpretazione Tattile di Alto Livello
Il riconoscimento si basa sul rilevamento trasformando i segnali tattili grezzi in conoscenze significative sull'oggetto contattato. A questo punto, il sistema va oltre il chiedere cosa sia successo al punto di contatto e inizia a chiedere che tipo di oggetto viene toccato, quali tratti fisici esso presenta e quale risposta dovrebbe seguire.
Il riconoscimento può comportare:
• identificazione della forma
• stima delle dimensioni
• valutazione della durezza
• interpretazione del modello di contatto
• analisi della struttura dei bordi
• valutazione delle condizioni di presa
Questa transizione dalla misurazione fisica all'interpretazione strutturata consente alla sensazione tattile di supportare una manipolazione intelligente piuttosto che limitarsi a riportare eventi di contatto. È anche la fase in cui il giudizio ingegneristico diventa più visibile, poiché l'interpretazione deve rimanere ancorata a segnali che sono spesso incompleti, rumorosi e dipendenti dal contesto.
Il riconoscimento richiede che il sistema organizzi le informazioni percepite in modelli associati a caratteristiche di oggetti noti. Un'area di contatto ampia combinata con una bassa pressione locale può indicare un oggetto morbido o cedevole. Un modello di forza concentrato accompagnato da micro-scivolamento può indicare una superficie rigida sotto una presa insufficiente. Distribuzioni spaziali ripetute possono ulteriormente rivelare bordi, angoli o geometrie curve.
I possibili indizi di riconoscimento includono:
• ampia area di contatto con bassa pressione
• forza concentrata con micro-scivolamento
• modelli di pressione spaziale ripetuti
In questo senso, il riconoscimento tattile va oltre la semplice classificazione. Riflette una lettura contestuale dell'interazione nel tempo. I sistemi più affidabili tendono a interpretare il tatto come un evento in evoluzione piuttosto che come una singola misurazione congelata, che è spesso un modo più onesto per affrontare come il contatto fisico si svolge realmente.
La qualità del riconoscimento è fortemente influenzata dalla qualità del rilevamento precedente. Se la localizzazione del contatto è imprecisa, l'inferenza sulla forma diventa instabile. Se le misurazioni della forza derivano, la stima della durezza può diventare fuorviante.
Le comuni limitazioni a monte includono:
• localizzazione del contatto imprecisa
• deriva delle misurazioni della forza
• dati di distribuzione della pressione instabili
• risposta temporale incoerente
A causa di questa dipendenza, il riconoscimento è meglio compreso come il risultato di una pipeline di sensing stratificata piuttosto che come un passo finale isolato. Nella pratica di sviluppo, non è insolito vedere le prestazioni di classificazione apparire impressionanti nella valutazione di laboratorio e poi attenuarsi durante il maneggiamento reale, dove l'orientamento dell'oggetto, la velocità della presa e la contaminazione della superficie alterano il segnale stesso. Quella discrepanza può essere deludente, ma offre anche un sobrio promemoria tecnico: le prestazioni dipendono non solo dalla sofisticazione algoritmica, ma anche da quanto fedelmente i dati riflettono le reali condizioni di contatto.
Pipeline di elaborazione nei sistemi tattili pratici
Nei sistemi tattili pratici, la rilevazione e il riconoscimento sono collegati attraverso una catena di elaborazione del segnale strutturata. Il sensore produce prima uscite analogiche che riflettono l'interazione meccanica. Queste uscite vengono quindi condizionate per migliorare la qualità del segnale e ridurre la distorsione. Dopo la conversione da analogico a digitale, il filtraggio sopprime il rumore preservando i modelli utili. L'estrazione delle caratteristiche identifica i componenti informativi, e gli algoritmi di classificazione o inferenza mappano quei componenti agli attributi degli oggetti o agli stati di contatto.
Una sequenza di elaborazione tipica include:
• generazione del segnale analogico
• condizionamento del segnale
• conversione da analogico a digitale
• filtraggio
• estrazione delle caratteristiche
• classificazione o inferenza
Questa sequenza può sembrare ordinata sulla carta, ma ogni fase influenza ciò che la fase successiva è autorizzata a "vedere". Una volta che le informazioni utili vengono indebolite o rimosse troppo presto, gli algoritmi successivi hanno poche possibilità di recuperarle.
Il condizionamento del segnale viene utilizzato perché le uscite tattili grezze sono spesso deboli, non lineari o vulnerabili alle interferenze.
Le operazioni di condizionamento comuni includono:
• amplificazione
• adattamento dell'impedenza
• correzione della linea di base
Queste operazioni preparano il segnale per un'analisi successiva. La conversione da analogico a digitale determina quindi quanto fedelmente l'evento di contatto continuo è catturato in forma digitale. Se il campionamento è troppo lento, le variazioni legate allo scivolamento potrebbero passare inosservate. Se la quantizzazione è troppo grossolana, le sottigliezze delle differenze legate alla texture potrebbero scomparire. Un buon design di sistema dipende quindi dall'allineamento dei parametri di elaborazione elettronica con il comportamento meccanico osservato, il che richiede spesso più moderazione e messa a punto di quanto ci si aspetti dai progetti iniziali.
Il filtraggio fa più che rimuovere il rumore indesiderato; modella direttamente i confini percettivi del sistema. Un filtraggio eccessivo può cancellare i modelli transitori associati a scivolamenti precoci o contatti testurizzati. Un filtraggio insufficiente può consentire al rumore di masquerare come un evento significativo.
Esempi tipici di caratteristiche includono:
• spostamento del baricentro della pressione
• pendenza forza-tempo
• varianza locale
• firma nel dominio della frequenza
La stessa tensione appare nell'estrazione delle caratteristiche. Caratteristiche efficaci preservano la rilevanza fisica riducendo la complessità non necessaria. Nei sistemi di lavoro, caratteristiche interpretabili si rivelano spesso particolarmente utili, poiché consentono agli ingegneri di tracciare i casi di guasto, affinare il comportamento di controllo e evitare la scomoda situazione in cui un modello produce risposte che sembrano accurate ma rimangono difficili da spiegare.
Una volta estratte le caratteristiche, gli algoritmi di classificazione assegnano un significato all'evento di contatto.
Questi algoritmi possono essere utilizzati per:
• distinguere le categorie di oggetti
• stimare la classe di materiale
• rilevare la presa stabile rispetto allo scivolamento
• identificare modelli di contatto ricorrenti
Tuttavia, la classificazione non dovrebbe essere trattata come una stretta competizione di accuratezza di riferimento. Un modello con un'accuratezza misurata leggermente inferiore può funzionare meglio durante l'implementazione se generalizza in modo più affidabile e risponde in modo più prevedibile sotto deriva del sensore o variazione ambientale. Da un punto di vista di sistema, una intelligenza tattile affidabile è spesso costruita attraverso una gestione disciplinata dell'incertezza piuttosto che attraverso un adattamento aggressivo a set di dati idealizzati.
Relazione tra Rilevazione e Riconoscimento
La rilevazione e il riconoscimento sono spesso descritti come funzioni separate, ma in pratica rimangono profondamente interdipendenti. La rilevazione fornisce la struttura misurabile del tatto, mentre il riconoscimento conferisce a quella struttura un significato operativo. Se la rilevazione manca di precisione, il riconoscimento diventa fragile. Se il riconoscimento è assente, la rilevazione rimane descrittiva senza offrire abbastanza direzione per l'azione. Per questo motivo, i sistemi tattili efficaci sono solitamente progettati con hardware di rilevamento, elaborazione del segnale e logica decisionale allineati in modo deliberato con il compito di manipolazione previsto.
Durante la presa robotica, la rilevazione può confermare prima il contatto e misurare la distribuzione della forza. Il riconoscimento interpreta quindi se l'oggetto è morbido, rigido, scivoloso, centrato o disallineato.
Questa interpretazione può guidare:
• regolazione della presa
• pianificazione del movimento
• risposta di sicurezza
In questo contesto a loop chiuso, la rilevazione tattile serve come parte della logica di controllo attivo piuttosto che come un canale di misura passiva. I sistemi più robusti sono quindi spesso orientati al compito. Non tentano di rilevare ogni variabile con uguale enfasi. Invece, si concentrano sulle informazioni che supportano in modo più diretto azioni stabili, informate e tecnicamente difendibili.
Comprensione più ampia dei loro ruoli principali
I principali ruoli dei sensori tattili si estendono ben oltre la semplice rilevazione del contatto. A un livello più profondo, supportano una comprensione fisica strutturata attraverso un rilevamento stratificato, l'elaborazione dei segnali e l'interpretazione. La rilevazione cattura i fatti osservabili del contatto. Il riconoscimento spiega cosa suggeriscono quei fatti sull'oggetto e sull'interazione. Tra questi due strati si trova la più ampia sfida ingegneristica dell'intelligenza tattile: mantenere informazioni fisicamente utili mentre vengono convertite in conoscenza azionabile. Un sistema tattile ben progettato si distingue non perché produce più dati, ma perché converte il contatto in un giudizio sano con sufficiente velocità, precisione e affidabilità per supportare l'interazione nel mondo reale.
Evoluzione dei Sensori Tattile e Espansione Tecnica

Sensori Tattile negli Anni '70
La ricerca sui sensori tattili è avanzata lentamente durante gli anni '70, quando i sistemi robotici erano principalmente progettati per determinare se era avvenuto un contatto e per stimare l'ampiezza della forza applicata. La maggior parte dei sistemi tattili di quel periodo si concentrava su queste due domande fondamentali. Questa limitazione rifletteva lo stato più ampio della tecnologia robotica dell'epoca. Le architetture di controllo erano relativamente semplici, le risorse di calcolo erano limitate e l'integrazione meccanica presentava spesso sfide maggiori rispetto agli elementi di rilevamento stessi.
Di conseguenza, i primi sensori tattili presentavano tipicamente una bassa risoluzione spaziale, una sensibilità limitata, una breve durata di servizio e prestazioni instabili in condizioni di carico ripetuto. Sebbene questi dispositivi potessero sostenere operazioni di base relative al contatto, raramente fornivano la coerenza richiesta per compiti di manipolazione delicati o operazioni in ambienti incerti. Molti dei primi esperimenti ingegneristici hanno rivelato che la sfida si estendeva oltre la rilevazione della pressione. Gli ingegneri dovevano anche mantenere una qualità del segnale affidabile nonostante la deformazione ripetuta, le fluttuazioni di temperatura e l'usura della superficie. Questa esperienza ha stabilito un principio importante che continua a influenzare lo sviluppo dei sensori tattili oggi: il rilevamento tattile utile richiede progressi simultanei nella qualità del segnale, nella compliance meccanica e nella robustezza del sistema. Nel corso della storia del settore, questo equilibrio ha spesso distinto i sistemi pratici di successo da promettenti prototipi di laboratorio.
Tecnologie di Rilevamento negli Anni '80
Negli anni '80, la ricerca sui sensori tattili è entrata in un periodo di sviluppo molto più rapido. I ricercatori hanno ampliato il loro lavoro oltre i dispositivi a principio unico e hanno iniziato a indagare su un'ampia gamma di tecnologie di rilevamento, tra cui approcci resistivi, capacitivi, piezoelettrici, ottici, ultrasonici, termici e magnetici. Questa diversificazione è avvenuta perché ciascun meccanismo di rilevamento offriva vantaggi unici, pur introducendo le proprie limitazioni. Gli ingegneri dovevano frequentemente bilanciare requisiti in competizione che riguardavano sensibilità, larghezza di banda, flessibilità strutturale, immunità al rumore, complessità di produzione e costi.
I sensori tattili resistivi erano generalmente semplici da fabbricare e integrare in sistemi più grandi, ma la deriva a lungo termine poteva ridurre l'affidabilità delle misurazioni. I sensori capacitivi offrivano alta sensibilità e basso consumo energetico, anche se richiedevano schermature accurate e circuiti di supporto elettronico stabili. I sensori piezoelettrici rispondevano in modo efficace a forze variabili ma erano meno adatti per misurare carichi statici. I sensori tattili ottici fornivano alta risoluzione e una forte resistenza alle interferenze elettromagnetiche, ma spesso richiedevano strutture di imballaggio più complicate. Man mano che la ricerca progrediva, diventava sempre più chiaro che nessun principio di rilevamento singolo poteva soddisfare ogni applicazione. Le strategie di design pratico si sono quindi spostate verso la selezione delle tecnologie di rilevamento in base ai requisiti del compito piuttosto che perseguire una soluzione universale.
Elaborazione dei Dati Tattili ed Esplorazione Attiva
Gli anni '80 hanno visto anche progressi significativi nell'elaborazione dei dati tattili e nell'esplorazione tattile attiva. Questo sviluppo ha rappresentato un cambiamento importante nel modo in cui i ricercatori valutavano le prestazioni del rilevamento tattile. L'efficacia di un sistema tattile non era più determinata esclusivamente dalle proprietà dei materiali o dal design del trasduttore. Le prestazioni dipendevano sempre più da come le informazioni tattili venivano elaborate e interpretate durante l'interazione con l'ambiente.
L'automazione industriale ha giocato un ruolo cruciale nel guidare questa transizione. Ci si aspettava che i robot rilevassero lo slittamento, stimassero le condizioni di contatto, identificassero le caratteristiche superficiali e regolassero la forza di presa in tempo reale. Attraverso l'implementazione pratica, i ricercatori hanno scoperto ripetutamente che i segnali tattili grezzi contenevano significato limitato da soli. Informazioni preziose emersero solo dopo calibrazione, filtraggio, estrazione di caratteristiche e analisi specifiche per compiti. Di conseguenza, la storia della rilevazione tattile divenne non solo una storia di miglioramenti hardware, ma anche una storia di trasformazione delle misurazioni di contatto in informazioni di controllo azionabili.
Imaging tattile e percezione integrata negli anni '90
Negli anni '90, la ricerca sui sensori tattili era diventata più ampia, più sistematica e sempre più interdisciplinare. L'attenzione si spostò dagli elementi di rilevamento individuali verso framework di rilevamento completi che incorporavano architetture sensoriali, imaging tattile, riconoscimento delle forme, percezione attiva e sistemi robotici integrati. Durante questo periodo, la rilevazione tattile maturò anche concettualmente. Invece di essere vista come un componente ausiliario aggiunto verso la fine dello sviluppo del sistema, la rilevazione tattile iniziò ad essere riconosciuta come un canale di percezione indipendente con le proprie caratteristiche spaziali, dinamiche temporali e importanza funzionale.
L'imaging tattile consentì di rappresentare informazioni di contatto distribuite in una forma simile ai dati visivi. Questa capacità aprì nuove opportunità per il riconoscimento di pattern e la caratterizzazione degli oggetti. La ricerca nel riconoscimento delle forme dimostrò ulteriormente che le informazioni tattili potevano rivelare dettagli che i sistemi visivi spesso faticavano a ottenere. Questi vantaggi divennero particolarmente evidenti quando gli oggetti erano occlusi, deformabili, riflettenti, sommersi o situati in ambienti confinati. L'esperienza pratica mostrò costantemente che quando le informazioni visive diventano inaffidabili, le informazioni tattili spesso diventano più preziose. Di conseguenza, la rilevazione tattile si spostò gradualmente da un ruolo di supporto verso una posizione più centrale nella manipolazione e percezione robotica.
Applicazioni mediche dei sensori tattili nei primi anni 2000
All'inizio degli anni 2000 si verificò un'altra grande transizione mentre la rilevazione tattile si espandeva in applicazioni mediche e sul campo. Questo cambio rifletteva sia miglioramenti tecnologici che una crescente consapevolezza dell'importanza del feedback tattile in ambienti operativi impegnativi.
Nel 2002, i sensori tattili furono integrati in cateteri utilizzati per la chirurgia endoscopica per stimare la rigidità dei tessuti e ridurre il rischio di applicare forze eccessive. Questo sviluppo fu particolarmente significativo perché le procedure minimamente invasive limitano il feedback tattile diretto e richiedono ai chirurghi di dover fare riferimento pesantemente a informazioni indirette. Anche il ripristino parziale della sensazione tattile migliorò la sicurezza e la precisione della procedura.
Nel 2003, un team di ricerca giapponese sviluppò un sensore tattile piezoelettrico tridimensionale per un dito robotico e lo applicò a un'interfaccia di simulazione del fegato utilizzata nella formazione chirurgica minimamente invasiva. Questo lavoro dimostrò che la rilevazione tattile poteva supportare non solo la manipolazione diretta ma anche la simulazione, la formazione e lo sviluppo delle abilità. Interfacce tattili ben progettate aiutarono gli utenti a distinguere sottili variazioni di forza e ridussero il tempo necessario per adattarsi a procedure complesse.
Rilevazione tattile per robotica subacquea e sul campo
Nel 2009, i ricercatori tedeschi implementarono un sistema di rilevazione tattile su un robot subacqueo ispirato a un polpo, consentendo una rilevazione degli ostacoli più autonoma ed esplorazioni del fondo marino. Questo progetto illustrò il valore strategico della rilevazione tattile in ambienti dove la visibilità è limitata, le condizioni di illuminazione sono scarse o la qualità dell'acqua interferisce con i sistemi ottici. In tali situazioni, il tatto può diventare una delle fonti più affidabili di informazioni ambientali.
Dalla rilevazione del contatto alla percezione intelligente
Preso nel suo insieme, lo sviluppo della rilevazione tattile dimostra una chiara progressione dalla rilevazione di forze di base verso sistemi di percezione sofisticati in grado di supportare il controllo a ciclo chiuso in ambienti complessi. Il significato più profondo di questa evoluzione risiede non solo nell'espansione delle applicazioni, ma anche nelle aspettative in cambiamento riposte nelle tecnologie di rilevazione tattile.
La percezione tattile è evoluta da un rilevatore di contatto passivo a un'interfaccia attiva tra macchine e il loro ambiente. I progressi più significativi si sono verificati quando i ricercatori hanno riconosciuto il tatto come un canale di percezione unico piuttosto che semplicemente un sostituto della vista. Le informazioni tattili possono rivelare proprietà come rigidità, texture, scivolamento, geometria locale e intento di interazione. Guardando al futuro, i progressi futuri dipenderanno probabilmente meno da miglioramenti isolati nella sensibilità e più dall'integrazione di materiali avanzati, design meccanico, interpretazione del segnale e strategie di controllo all'interno di framework sensoriali unificati. La storia del campo ha già dimostrato il valore di sensori migliori. Tuttavia, altrettanto importante è la crescente comprensione che un'interpretazione migliorata dell'interazione ha spesso un impatto ancora maggiore sulle prestazioni del sistema.
Classificazione dei sensori tattili
I sensori tattili possono essere interpretati da prospettive sia ampie che ristrette.
In senso ampio, coinvolgono la percezione del tatto, della pressione, della forza, dello scivolamento, della temperatura, della texture superficiale e delle vibrazioni.
In senso ristretto, si concentrano sull'interazione meccanica formata all'interfaccia di contatto tra un sistema robotico e un oggetto esterno.
Dal punto di vista ingegneristico, la visione più ristretta è spesso più diretta perché allinea gli obiettivi di misurazione con la presa, la manipolazione, la regolazione del contatto e il controllo del movimento. Questa distinzione può sembrare sottovalutata a prima vista, eppure spesso libera il pensiero concettuale e aiuta le discussioni progettuali a rimanere ancorate a comportamenti misurabili.
Un percorso di classificazione più utile guarda oltre la funzione e considera anche il principio fisico che converte eventi di contatto in segnali misurabili.
I gruppi funzionali comuni includono sensori di contatto, sensori di forza-momento, sensori di pressione e sensori di scivolamento.
Questi gruppi rimangono informativi, ma i loro confini spesso sfumano nell'effettiva implementazione. Un'unità sensoriale può rispondere a forze normali, forze tangenziali e scivolamenti precoci all'interno della stessa interazione. Per questo motivo, la classificazione per metodo di trasduzione fornisce spesso una struttura tecnica più chiara. Chiarisce non solo cosa un sensore rileva, ma anche come si comporta sotto rumore, carico sostenuto, limiti di imballaggio, pressione di calibrazione e vincoli di integrazione a livello di sistema. Nel lavoro ingegneristico reale, questo secondo livello di classificazione risolve spesso dibattiti che le etichette puramente funzionali lasciano irrisolti.
Vista funzionale dei sensori tattili
Da una prospettiva funzionale, i sensori tattili sono di solito raggruppati in base alla quantità fisica o all'evento che ci si aspetta catturino.
Sensori di contatto
I sensori di contatto determinano se è avvenuto un contatto fisico tra una superficie sensoriale e un oggetto. La loro uscita può essere binaria o basata su soglia, eppure quel feedback apparentemente modesto spesso stabilisce il tono per l'intera sequenza di interazione. Nella presa robotica, un semplice segnale di contatto può limitare la forza di chiusura eccessiva, ridurre i danni legati alle collisioni e supportare logiche di controllo attivate dagli eventi. Molti sistemi operativi iniziano con una rilevazione di contatto affidabile prima di progredire verso stime di forza più elaborate.
L'implementazione pratica rivela ripetutamente la stessa lezione: quando il primo contatto viene rilevato troppo tardi, o quando il segnale arriva con troppo rumore, il controllo a valle diventa più difficile da gestire. Gli ingegneri tendono a percepire rapidamente questo problema, perché anche un controllore ben sintonizzato perde la calma quando il primo indizio fisico è vago.
Sensori di forza-momento
I sensori di forza-momento misurano forze e coppie che agiscono all'interfaccia di contatto. Servono a situazioni in cui un sistema deve fare più che confermare il contatto; deve anche interpretare direzione, grandezza ed effetto rotazionale. Questa capacità supporta la manipolazione abile, l'assemblaggio conforme e l'uso di strumenti.
Il loro contributo risiede nel contribuire a un robot ad aggiustare postura, presa e movimento quando i carichi si spostano in modi sottili. In pratica, la precisione della forza da sola raramente racconta tutta la storia.
Trasformazione delle coordinate stabile, basso accoppiamento trasversale, montaggio ripetibile.
Questi fattori spesso influenzano le prestazioni complessive in modo altrettanto forte. I designer esperti di solito imparano questo con un certo disagio, perché specifiche sensoriali eleganti possono perdere gran parte del loro fascino una volta che l'incoerenza nel montaggio inizia a distorcere i dati.
Sensori di pressione
I sensori di pressione catturano la distribuzione spaziale del carico normale su un'area di contatto. Questo li rende ben abbinati a matrice tattili, pelle artificiale, valutazione della presa e stima della forma dell'oggetto. La mappatura della pressione fornisce più di una grandezza di forza netta.
• Mostra dove è concentrato il carico.
• Mostra come il carico si sposta nel tempo.
• Mostra se l'attuale schema di contatto suggerisce una presa stabile o un sovraccarico locale.
In molte attività di manipolazione, le informazioni sulla pressione distribuita dicono di più di un singolo valore di forza risultante, perché il contatto effettivo raramente si verifica in un punto idealizzato. Questa è una delle ragioni per cui le dense matrici di pressione continuano ad attirare attenzione, anche quando i requisiti di cablaggio e di elaborazione del segnale mettono alla prova la pazienza del team di design.
Sensori di Scivolamento
I sensori di scivolamento rilevano il movimento relativo, o l'inizio del movimento, tra la superficie di contatto e un oggetto. Il loro ruolo diventa particolarmente significativo perché una presa riuscita dipende non solo dall'applicazione della forza, ma anche dalla percezione quando quella forza non è più sufficiente. Una rilevazione precoce dello scivolamento offre al sistema di controllo la possibilità di aumentare la presa prima che si verifichi una completa perdita dell'oggetto.
In contesti pratici, i segnali di scivolamento più utili sono spesso quelli che espongono micro-movimenti poco prima di un fallimento visibile. Segnali che confermano semplicemente lo scivolamento dopo che è ovvio sono di gran lunga meno utili. Questo breve periodo di transizione porta un peso insolito nella manipolazione, e molti ingegneri sviluppano un sano rispetto per esso dopo aver assistito al fallimento di prese altrimenti promettenti in una frazione di secondo.
Classificazione per Metodo di Trasduzione
La classificazione funzionale descrive l'obiettivo di rilevamento, mentre la classificazione basata sulla trasduzione spiega il meccanismo interno che genera il segnale. Per le decisioni di design, questo approccio è spesso più rivelatore perché influisce direttamente su sensibilità, linearità, robustezza, costo, capacità di produzione e compatibilità con l'hardware robotico. Fornisce anche un quadro più sincero di ciò che un sensore richiederà dopo la fase prototipale, quando l'ottimismo di solito incontra la disciplina dell'integrazione.
Sensori Tattile Piezoresistivi
I sensori piezoresistivi funzionano cambiando la resistenza elettrica sotto carico meccanico applicato. Sono ampiamente utilizzati perché il principio è semplice, l'elettronica è relativamente semplice e il costo può rimanere contenuto. Si adattano anche bene all'integrazione in matrice, il che li rende attraenti per pelli tattili a grande area e superfici di mappatura della pressione.
Il loro maggiore fascino risiede nella praticità. Sono relativamente facili da fabbricare, interfacciare e scalare in molte applicazioni. Questa convenienza spiega perché appaiono così spesso in prototipi e concetti commerciali. Allo stesso tempo, i loro svantaggi non possono essere trascurati.
Deriva della resistenza, isteresi, sensibilità alla temperatura, affaticamento materiale a lungo termine.
Questi effetti possono ridurre l'affidabilità delle misure. Sotto carico ripetuto, il segnale può deviare anche quando la forza applicata non cambia. Questo è più di un fastidio teorico minore; crea spesso oneri di calibrazione e rende il controllo della forza in retroazione meno prevedibile nel tempo.
L'esperienza di implementazione tende a puntare nella stessa direzione: i sensori piezoresistivi funzionano meglio quando il design riconosce le loro imperfezioni in fase iniziale.
Selezione del materiale, strategia di compensazione, routine di ricampionamento.
Queste scelte progettuali di solito contano più delle caratteristiche statiche idealizzate sulla carta. Questa conclusione non è affascinante, ma è spesso dove inizia il giudizio ingegneristico durevole.
Sensori Tattile Ottici
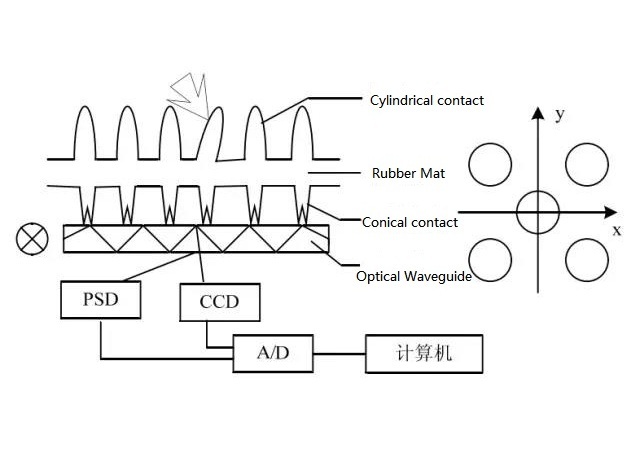
I sensori tattili ottici rilevano la deformazione misurando i cambiamenti di intensità della luce, percorso della luce, riflessione, rifrazione o caratteristiche dell'immagine all'interno della struttura di rilevamento. Poiché il principio di rilevamento è separato dalla lettura diretta della deformazione elettrica, questi sensori possono offrire una forte immunità all'interferenza elettromagnetica e possono fornire ricche informazioni spaziali.
Il loro vantaggio più sorprendente è la densità informativa. I metodi ottici possono catturare geometrie di contatto dettagliate, campi di deformazione e, in alcuni progetti, schemi legati allo sforzo di taglio. Questo li rende altamente preziosi per il riconoscimento degli oggetti, la caratterizzazione delle superfici e la manipolazione fine. Nei sistemi avanzati, il rilevamento tattile ottico può funzionare quasi come un imaging della superficie di contatto, offrendo agli ingegneri un livello di dettaglio difficile da ignorare una volta che l'hanno visto funzionare bene.
Il compromesso risiede nella complessità strutturale.
Confezionamento accurato, illuminazione controllata, allineamento preciso, elaborazione non triviale delle immagini o dei segnali.
Questi requisiti non sono incidentali. Le prestazioni possono diminuire quando il percorso ottico interno si sposta, quando l'elastomero invecchia o quando gli agenti contaminanti alterano il comportamento riflessivo. In uso reale, un concetto che appare elegante in laboratorio può diventare ostinatamente difficile come prodotto, principalmente perché la robustezza meccanica e la coerenza ottica sono più difficili da preservare di quanto ci si aspetti. Per questo motivo, il rilevamento tattile ottico tende ad essere più persuasivo quando la percezione ricca compensa genuinamente il carico di sistema aggiuntivo.
Sensori Tattile Capacitivo
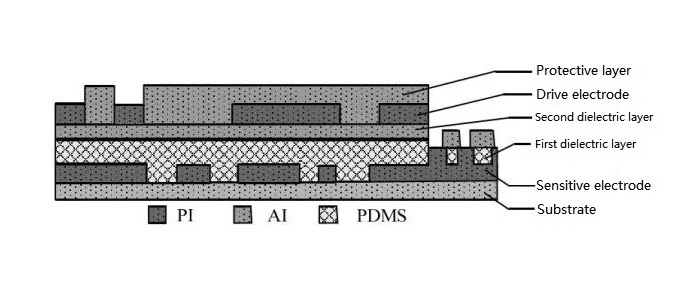
I sensori tattili capacitivo misurano la forza o la pressione attraverso cambiamenti nella capacità causati dallo spostamento degli elettrodi, dalla variazione dell'area di contatto o dalla deformazione dielettrica. Sono noti per l'alta sensibilità, il basso consumo energetico e la forte reattività. Per una misurazione tattile raffinata, sono spesso visti con ottimismo considerevole.
Un grande vantaggio della rilevazione capacitiva è che piccole modifiche strutturali possono produrre risposte elettriche misurabili. Questo supporta la rilevazione di leggeri tocchi e variazioni sottili di pressione, che è altamente utile nell'interazione conforme e nella presa delicata. Le strutture capacitive possono anche essere rese sottili e flessibili, rendendole molto adatte a superfici di rilevamento distribuite.
Allo stesso tempo, questi sensori sono vulnerabili a diverse perturbazioni.
Capacità parassita, rumore ambientale, effetti dell'umidità, interferenza elettromagnetica.
Tali fattori possono introdurre instabilità o variazione falsa, specialmente in array densi e assemblaggi robotici compatti dove le linee del segnale sono strettamente raggruppate. Nella pratica, le prestazioni utilizzabili sono spesso decise dalla disciplina di implementazione piuttosto che solo dalla teoria.
Schermatura, messa a terra, layout del circuito, architettura di lettura.
Questi aspetti determinano frequentemente se la sensibilità attesa diventa dati affidabili. Molti team scoprono che la rilevazione capacitiva appare ingannevolmente semplice a livello di principio, per poi diventare molto più esigente durante l'integrazione.
Sensori Tattili Conduttivi Magnetici
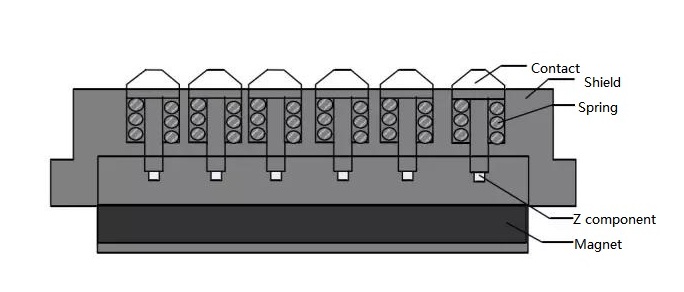
I sensori tattili conduttivi magnetici trasformano i cambiamenti indotti dalla forza nella distribuzione del campo magnetico in uscita elettrica. Le loro strutture combinano spesso un mezzo deformabile, elementi magnetici e componenti sensibili al campo come dispositivi Hall o elementi magnetoresistivi. Questo metodo può supportare design compatti, sensibilità pratica e, in alcuni casi, buona tolleranza all'usura meccanica all'interfaccia elettrica.
Una caratteristica interessante è che la deformazione meccanica non richiede sempre un contatto elettrico diretto al punto di misurazione. Questo può migliorare la durabilità ed espandere le opzioni di design strutturale. I metodi magnetici possono anche supportare la rilevazione multidirezionale quando il campo magnetico è intenzionalmente modellato e misurato su più assi.
Anche così, questi sensori sono meno comuni nelle piattaforme robotiche tradizionali. I motivi vanno oltre le sole prestazioni di rilevamento.
Disturbi magnetici esterni, vincoli di imballaggio, difficoltà di calibrazione, storia limitata di standardizzazione industriale.
Tutti questi fattori influenzano la loro diffusione. Tuttavia, questa classe spesso riceve meno attenzione di quella che merita. Quando sono necessari indizi di forza tridimensionale compatti e le condizioni ambientali rimangono gestibili, la rilevazione magnetica può offrire una via equilibrata tra la semplicità strutturale e informazioni più ricche. È il tipo di opzione che potrebbe non dominare le discussioni inizialmente, ma può diventare sorprendentemente convincente nell'applicazione giusta.
Sensori Tattili Piezoelettrici
I sensori tattili piezoelettrici generano cariche elettriche quando sono sottoposti a stress meccanico. Sono particolarmente efficaci per la rilevazione di forze dinamiche perché rispondono rapidamente e possono produrre output ad alta relazione segnale-rumore durante eventi transitori. Questo li rende ben adatti alla rilevazione di impatti, alla rilevazione di vibrazioni, a eventi legati alla texture e al monitoraggio dei cambiamenti rapidi di contatto.
La loro limitazione è altrettanto familiare: generalmente non sono ben adatti alla misurazione della forza statica perché la carica generata tende a decrescere nel tempo. Di conseguenza, eccellono nel rilevare cambiamenti, ma non mantengono un valore costante con grazia sotto carico costante. Questa caratteristica non indebolisce la tecnologia per default; definisce semplicemente dove il metodo riesce con fiducia e dove non riesce.
Alcuni dei design più forti emergono quando questa natura dinamica è trattata come una caratteristica deliberata. Nei sistemi di manipolazione, gli elementi piezoelettrici sono spesso più efficaci quando abbinati ad altre modalità di rilevamento. Possono catturare eventi rapidi che sensori più lenti o inclini alla deriva potrebbero perdere. In questo senso, si inseriscono naturalmente in architetture tattili ibride, dove le informazioni statiche e dinamiche sono separate anziché forzate in un unico canale compromesso.
Direzioni Ingegneristiche Pregresse nello Sviluppo di Sensori Tattili
Il lavoro storico e contemporaneo in queste categorie di sensori punta a diverse direzioni ricorrenti.
Rilevazione Multidirezionale
La rilevazione tattile moderna sta andando oltre la semplice rilevazione della forza normale verso la misurazione simultanea della forza normale, della forza di taglio, della coppia e del movimento relativo allo scivolamento.
Forza normale, forza di taglio, coppia, movimento relativo allo scivolamento.
Questo cambiamento riflette una comprensione più profonda della manipolazione. Il contatto reale è intrinsecamente multidimensionale. Un sensore che misura solo un componente può comunque essere utile, ma non può descrivere completamente come un oggetto viene tenuto, spinto, torcigliato o rilasciato. Man mano che le attività di manipolazione diventano più abili, il rilevamento multidirezionale sembra meno un raffinamento opzionale e più una risposta naturale alla realtà fisica.
Maggiore densità dell'array
Un'altra direzione visibile è lo sviluppo di array tattili più densi. Una maggiore densità migliora la risoluzione spaziale e consente a una superficie sensoriale di catturare dettagli più fini della distribuzione del contatto, della posizione dei bordi, della deformazione locale e degli indizi di texture.
Distribuzione del contatto, posizione dei bordi, deformazione locale, indizi di texture.
Tuttavia, una densità maggiore aumenta anche la complessità dei cablaggi, le richieste di lettura, il rischio di interferenze e il carico di elaborazione dei dati. Questo crea un compromesso ingegneristico familiare: più dati non diventano automaticamente informazioni più utili a meno che l'elettronica e gli algoritmi a valle non siano pronti ad assorbirli in modo efficiente. Chiunque abbia lavorato all'integrazione di array densi sviluppa di solito sentimenti contrastanti, poiché l'attrattiva dei dati più ricchi arriva spesso insieme a un forte aumento del carico del sistema.
Integrazione del sistema più stretta
I sensori tattili sono sempre più progettati come parte di sistemi robotici completi piuttosto che come componenti isolati.
Conformità meccanica, condizionamento del segnale, elaborazione integrata, politica di controllo, montaggio strutturale.
Questi elementi sono ora più strettamente collegati. Questo riflette un cambiamento più ampio nel giudizio ingegneristico. Un sensore tattile acquisisce valore non solo dalla sensibilità grezza, ma dalla sua capacità di migliorare il comportamento a livello di sistema. Molti progetti falliscono non perché il principio di rilevamento sia debole, ma perché il sensore, il controllore e la struttura meccanica sono stati sviluppati come se appartenessero a mondi separati. Quella disconnessione è facile da sottovalutare durante lo sviluppo del concetto e difficile da perdonare una volta che il sistema raggiunge il funzionamento completo.
Una visione concreta della selezione del sensore
Nessun singolo metodo di rilevamento tattile è universalmente superiore. Ogni tecnologia rappresenta un diverso equilibrio tra sensibilità, robustezza, risposta temporale, fattibilità, risoluzione spaziale e onere di integrazione. La scelta più adatta dipende dal compito obiettivo, dall'ambiente operativo e dall'architettura di controllo circostante.
• Per il rilevamento distribuito a basso costo su ampia area, gli approcci piezoresistivi rimangono altamente attraenti.
• Per l'imaging del contatto ad alta risoluzione, i metodi ottici spesso forniscono una maggiore potenza espressiva.
• Per le misurazioni di tocco statico leggere e sensibili, i sensori capacitivi rimangono allettanti quando le interferenze sono mantenute sotto controllo.
• Per la rilevazione di eventi dinamici, il rilevamento piezoelettrico mantiene un chiaro vantaggio.
• Per un rilevamento multidirezionale compatto in condizioni ben gestite, gli approcci magnetici offrono opzioni promettenti.
Un principio di selezione pratico è quello di scegliere il metodo di rilevamento in base alla modalità di guasto che conta di più. Se la preoccupazione principale è la mancanza di contatto statico di piccole dimensioni, una classe di sensori si distinguerà. Se la preoccupazione principale è non rilevare scivolamenti rapidi o impatti, un'altra classe avrà più senso. Questa prospettiva spesso porta a risultati di design migliori rispetto alla selezione di un sensore esclusivamente in base alla massima sensibilità o alla popolarità nella ricerca pubblicata. Richiede una conversazione più onesta con l'applicazione, e quell'onestà di solito ripaga.
La classificazione dei sensori tattili non è solo un esercizio di denominazione delle categorie. Essa esprime la relazione tra contatto fisico, generazione di segnale e funzione robotica. La classificazione funzionale spiega quale tipo di informazione sul contatto è ricercata. La classificazione basata sulla trasduzione spiega come tali informazioni vengono ottenute fisicamente e quali compromessi tecnici la accompagnano.
La direzione più ampia del campo suggerisce che i sistemi tattili futuri faranno meno affidamento sulle prestazioni isolate dei sensori e più su strategie di rilevamento integrate.
Molteplici meccanismi, percezione spaziale densa, compatibilità diretta con i sistemi di controllo.
In questo contesto, il sensore tattile più efficace non è spesso quello con le specifiche più impressionanti da solo, ma quello che preserva informazioni affidabili sul contatto in condizioni operative reali. Questa conclusione può sembrare contenuta, ma continua a separare concetti lucidati da sistemi ai quali gli ingegneri possono affidarsi quando il lavoro smette di essere teorico.
Applicazioni dei sensori tattili
I sensori tattili hanno fatto progressi ben oltre la semplice rilevazione della pressione e ora supportano una gamma più ampia di funzioni avanzate in protesi, automazione industriale ed elettronica indossabile. Il loro contributo non si limita a identificare il contatto. Essi convertono l'interazione fisica in informazioni che possono essere interpretate con coerenza, agite con fiducia e allineate alle esigenze delle reali condizioni operative. Nei sistemi applicati, il loro valore pratico emerge quando i segnali grezzi vengono tradotti in giudizi attuabili.
• Quanto forte afferrare
• Quando fermare il movimento
• Come distinguere il contatto sicuro dalla forza dannosa
• Come restituire feedback significativi all'utente
Di conseguenza, il campo non è più plasmato solo dalla sensibilità. Ora è sempre più diretto dall'interpretazione del segnale, dalla compatibilità meccanica e dall'integrazione a livello di sistema.
Sensori Tattili nei Sistemi Protesici
Nella tecnologia protesica, ai sensori tattili è richiesto di fare molto di più che registrare la forza esterna. L'obiettivo più profondo è ricreare una forma di tatto che il corpo umano possa interpretare con meno sforzo e maggiore chiarezza intuitiva. La pelle naturale non descrive il contatto attraverso un valore ininterrotto. Dipende da meccanorecettori specializzati che trasformano pressione, vibrazione e texture in attività neurale basata su impulsi. Il timing e la frequenza di questi impulsi portano informazioni stratificate.
• Forma dell'oggetto
• Morbidezza
• Scivolamento
• Magnitudo della forza
Questo principio biologico ha influenzato progressivamente l'architettura dei sistemi di rilevamento protesici avanzati.
I sensori tattili artificiali tradizionali producono spesso variazioni di tensione analogica o di resistenza. Sebbene tali output rimangano utili per la misurazione, non si allineano naturalmente con lo stile di segnalazione basato su eventi del sistema nervoso. Pertanto, è necessaria un'ulteriore elaborazione per convertire gli output continui in modelli simili a picchi adatti alla stimolazione neurale o al controllo biomimetico. Questa fase di traduzione spesso decide se il feedback appare accessibile o mentalmente faticoso per chi lo indossa. Un sistema può funzionare con un'accuratezza impressionante in laboratorio eppure sentirsi ancora scomodo nell'uso quotidiano se il feedback arriva in ritardo, fluttua in modo imprevisto o riduce la sensibilità a segnali eccessivamente semplificati.
Codifica Neuromorfica e Naturalità Sensoriale
La codifica neuromorfica è emersa come una direzione prominente perché cerca di ridurre la distanza tra rilevamento artificiale e comunicazione biologica. Invece di concentrarsi solo sulla magnitudo del segnale, le strategie neuromorfiche enfatizzano la struttura temporale, la generazione di eventi sparsi e la codifica adattativa. Questo approccio può ridurre il carico di dati, abbreviare i tempi di risposta e produrre modelli di feedback che sembrano più vicini al tatto naturale. Una lezione progettuale pratica è diventata sempre più chiara: la naturalità dipende spesso meno dall'ottimizzazione della complessità e più dalla conservazione di transizioni significative.
• Primo contatto
• Carico crescente
• Inizio dello scivolamento
Durante le attività di manipolazione reale, queste transizioni portano solitamente più valore operativo rispetto ai valori statici di forza da soli.
L'esperienza nell'uso delle protesi ha ripetutamente dimostrato che i portatori spesso preferiscono un feedback che sia stabile e prevedibile rispetto a un feedback che è teoricamente più ricco ma più difficile da interpretare. Qualcuno che cerca di tenere una tazza di carta, allacciare una camicia o sollevare un oggetto fragile guadagna poco da dettagli eccessivi se quei dettagli arrivano in modo incoerente. Ciò che si rivela veramente utile è un'informazione tempestiva che riduce la possibilità di schiacciare, far cadere o regolare ripetutamente la presa. Per questo motivo, molti design di successo enfatizzano la codifica a bassa latenza, le soglie di forza calibrate e segnali sensoriali ripetibili.
Interfacce Flessibili e Integrazione Neurale
Materiali flessibili e interfacce morbide sono ampiamente utilizzati poiché i sistemi protesici devono interagire con superfici curve, giunture mobili e tessuti biologici sensibili. Le piattaforme di sensori rigidi possono offrire precisione, ma spesso portano disagio, concentrazione di stress localizzata e conformità a lungo termine debole. Gli strati tattili flessibili, gli elastomeri conduttivi e gli interconnettori estensibili migliorano l'abbinamento meccanico e consentono alle superfici sensoriali di rimanere funzionali durante la flessione e la deformazione ripetuta. Questa compatibilità meccanica influisce non solo sul comfort, ma anche sull'affidabilità del segnale e sulla vita utile.
Le interfacce neurali dirette introducono un altro livello di complessità. Una volta che l'output del sensore è destinato a nervi periferici, vie spinali o sistemi corticali, gli ingegneri devono affrontare diverse richieste strettamente collegate.
• Tempistica precisa
• Stimolazione sicura
• Stabilità dell'interfaccia a lungo termine
La sfida è quindi duplice. Il sensore deve rilevare eventi esterni con precisione e l'interfaccia deve consegnare quegli eventi in una forma che l'utente possa apprendere gradualmente e su cui possa fare affidamento con sicurezza. In pratica, la fiducia cresce quando il feedback rimane coerente attraverso compiti ripetuti. Anche un'interfaccia tecnicamente sofisticata può essere messa da parte se le sue risposte cambiano notevolmente con sudore, movimento della presa o usura meccanica abituale.
Barriere Rimanenti nell'adozione Protesica
Nonostante i progressi sostanziali, diverse barriere rallentano ancora l'adozione più ampia.
• Biocompatibilità a lungo termine
• Efficienza energetica
• Deriva del segnale
• Calibrazione individualizzata
Un altro problema persistente è che il tatto protesico viene spesso valutato in condizioni di test controllate che non riflettono appieno la vita quotidiana. Il successo in laboratorio con oggetti standard non si estende automaticamente a superfici bagnate, temperature variabili o movimenti rapidi e imprevisti. Una strategia di sviluppo più matura dovrebbe includere la diversità dei compiti nel mondo reale fin dall'inizio piuttosto che trattarla come qualcosa da esaminare solo alla fine.
Sensori Tattili nell'Automazione Industriale
Nell'automazione industriale, la percezione tattile rafforza le prestazioni robotiche aggiungendo consapevolezza fisica al polso, alla presa o all'attuatore finale. Questo ulteriore strato di percezione consente alle macchine di fare più che seguire traiettorie geometriche. Possono rispondere a condizioni di contatto reali, regolare la forza durante l'assemblaggio, rilevare ostacoli imprevisti e gestire parti delicate con maggiore precisione. Man mano che gli ambienti di produzione diventano più rapidi e variabili, la percezione tattile è sempre più considerata parte di una base ingegneristica robusta piuttosto che come un miglioramento facoltativo.
Un'ampia gamma di compiti industriali beneficia del feedback tattile.
• Assemblaggio robotico
• Inserimento
• Lucidatura
• Presa
• Ispezione della superficie
Nei compiti di inserimento, ad esempio, la visione può fornire un allineamento approssimativo, ma il successo finale dipende spesso da sottili variazioni di forza che rivelano direzione di contatto, attrito o inceppamento. Nella lucidatura o nella sbavatura, mantenere una pressione di contatto adeguata modella direttamente la qualità della superficie e la longevità dello strumento. Nella presa, la percezione tattile aiuta a rilevare lo scivolamento incipiente prima che un oggetto venga perso. Questi esempi mostrano che il tatto completa la visione fornendo una realtà fisica locale dove le informazioni in linea di vista rimangono incomplete o ambigue.
Controllo a Ciclo Chiuso e Intelligenza del Contatto
Uno dei contributi più chiari della percezione tattile nell'automazione si trova nel controllo a ciclo chiuso. Una volta che le informazioni su forza e contatto sono disponibili in tempo reale, i robot possono regolare rigidità, velocità e traiettoria in base allo stato del compito. Questo supporta l'aggiustamento della conformità, il rilevamento delle collisioni e la manipolazione adattiva. L'effetto più ampio è che la percezione tattile sposta un robot da essere un esecutore preprogrammato a diventare un sistema fisicamente reattivo.
Un modello rivelatore dai contesti di distribuzione è che molti fallimenti di contatto non derivano da una forza insufficiente del robot o da una pianificazione geometrica inadeguata, ma da un feedback locale mancante. Una presa può applicare una forza inadeguata non perché il controllore manchi di capacità, ma perché non ha un'indicazione affidabile della variazione di attrito, del disallineamento della parte o della deformazione della superficie. In queste situazioni, anche uno strato tattile modesto può migliorare le prestazioni in modo più evidente rispetto a un attuatore più potente. Ciò suggerisce che una gestione del contatto più intelligente spesso inizia con una migliore percezione prima di considerare meccaniche più aggressive.
Sicurezza e Interazione Uomo-Robot
Nella produzione collaborativa, la percezione tattile migliora anche la sicurezza. I robot che rilevano contatti imprevisti rapidamente sono in una posizione migliore per limitare la forza dell'impatto, fermare il movimento o passare a un comportamento conforme. Questo diventa particolarmente rilevante negli spazi di lavoro condivisi dove operatori e macchine lavorano a distanza ravvicinata. La sicurezza in questo contesto va oltre le fermate di emergenza. Include anche la riduzione dei quasi incidenti, il limitare le collisioni minori e consentire una cooperazione più fluida durante il passaggio o l'assemblaggio assistito.
Da un punto di vista ingegneristico, la difficoltà sta nel bilanciare sensibilità e robustezza. I sensori devono rilevare contatti significativi senza attivare falsi allarmi costanti a causa di vibrazioni, rumore degli strumenti o variazioni normali del processo. Nelle catene di produzione reali, sistemi eccessivamente sensibili possono diventare frustrantemente impraticabili perché interrompono il flusso di lavoro e erodono la fiducia degli operatori. Ecco perché i sistemi tattili industriali efficaci solitamente combinano logica di soglia, filtraggio e interpretazione specifica per il compito invece di fare affidamento solo sull'output grezzo del sensore.
Scalabilità e Vincoli di Ambienti Duri
Gli ambienti industriali pongono severi vincoli su durabilità, stabilità della calibrazione e costi di manutenzione.
• Polvere
• Olio
• Variazione della temperatura
• Impatti ripetuti
• Rumore elettromagnetico
Questi fattori possono degradare gradualmente o bruscamente le prestazioni del sensore. Un sensore che si comporta bene su una piattaforma di ricerca pulita può avere difficoltà in una cella di produzione ad alta ciclicità. Per questo motivo, l'adozione industriale dipende non solo dalla capacità di rilevamento, ma anche dall'imballaggio, dalla sigillatura, dalla sostituibilità e dalla trasparenza diagnostica.
La scalabilità presenta un'altra sfida. Un array tattile ad alta risoluzione può fornire dati eccellenti, ma il suo appeal pratico diminuisce se la manutenzione è costosa o se l'integrazione con i controller esistenti diventa gravosa. In molte strutture, la soluzione preferita non è quella con il più ricco output di dati, ma quella che continua a funzionare con una minima ricalibrazione e meno sorprese. L'affidabilità in condizioni imperfette rimane uno dei segni più persuasivi della maturità ingegneristica.
Sensori Tattile nell'Elettronica Indossabile
Negli apparecchi elettronici indossabili, i sensori tattili operano come strati di rilevamento distribuiti che monitorano forza, temperatura, umidità, movimento e altri segnali ambientali o fisiologici. Il loro ruolo si sta ampliando da semplice raccolta di dati a interazione sostenuta tra il corpo, il dispositivo e l'ambiente circostante. Questo ha posizionato il rilevamento tattile come un componente principale della pelle elettronica, dei capi smart, dei dispositivi di riabilitazione e delle piattaforme di monitoraggio della salute.
Lo sviluppo di substrati flessibili e circuiti allungabili ha migliorato sostanzialmente il comfort e l'adattabilità dei sistemi indossabili. Diverse classi di materiali sono frequentemente utilizzate perché combinano funzionalità elettrica con conformità meccanica.
• Grafene
• Nanotubi di carbonio
• Ossido di zinco
• Polimeri conduttivi
• Metalli liquidi
Questi materiali consentono ai sensori di piegarsi, allungarsi e conformarsi a superfici irregolari mantenendo sensibilità e continuità del segnale. L'adattabilità meccanica è molto importante perché un dispositivo indossabile deve funzionare sotto continua deformazione piuttosto che in condizioni da laboratorio ferme e controllate.
Innovazione Materiale e Espansione Funzionale
L'innovazione materiale ha ampliato il rilevamento tattile dalla rilevazione a un singolo parametro alla percezione multimodale. I moderni dispositivi indossabili mirano sempre più a rilevare più tipi di segnale all'interno di un'unica piattaforma integrata.
• Pressione
• Deformazione
• Calore
• Umidità
• Cambiamenti biochimici
Questo consente una interpretazione più ricca della condizione e dell'ambiente dell'utente. Ad esempio, i dati sulla pressione da soli possono indicare contatto, mentre la pressione combinata con temperatura e umidità può aiutare a distinguere esercizio, stress, esposizione ambientale o adattamento inadeguato.
Tuttavia, il rilevamento multimodale introduce anche nuova complessità. Con l'aggiunta di più canali di rilevamento, il crosstalk del segnale diventa una seria preoccupazione. Una variazione di temperatura può alterare un segnale di pressione e una deformazione meccanica può disturbare i percorsi elettrici destinati al rilevamento dell'umidità. Questo significa che l'aggiunta di funzioni non migliora automaticamente il design. In molti casi, la qualità del design è giudicata da quanto pulitamente le diverse modalità siano isolate, calibrate e fuse.
Integrazione a Livello di Sistema nelle Piattaforme Indossabili
Il design attuale degli indossabili è sempre più centrato sull'integrazione dell'intero sistema. I sensori sono ora combinati con unità funzionali aggiuntive.
• Moduli di alimentazione
• Unità di comunicazione wireless
• Circuiti di elaborazione del segnale
• Micro-attuatori per output tattili o risposta terapeutica
Questo cambiamento riflette una verità pratica: un sensore da solo non produce un sistema indossabile che le persone continueranno a utilizzare. Il vero valore appare solo quando il rilevamento, il calcolo, la trasmissione e il feedback operano come un'unica piattaforma coordinata.
Nella pratica, i problemi di integrazione spesso emergono prima dei limiti del rilevamento. Un dispositivo può mostrare un'eccellente sensibilità, ma può comunque diventare scomodo a causa del volume della batteria, del trasferimento wireless instabile, dell'irritazione della pelle o della perdita di segnale durante il movimento. Per questo motivo, i design indossabili più convincenti mostrano spesso moderazione. Perseguono prestazioni equilibrate, funzionamento a bassa potenza e comfort meccanico piuttosto che inseguire metriche isolate. Un dispositivo che le persone sono davvero disposte a indossare ogni giorno supera spesso uno superiore dal punto di vista tecnico che finisce per essere dimenticato in un cassetto.
Sfide di Durabilità e Uso a Lungo Termine
Piegature ripetute, torsioni, sudore e esposizione a variazioni di temperatura creano stress cumulativo nei sistemi indossabili. La fatica dei materiali può portare a diversi percorsi di degrado.
• Microfessure
• Delaminazione
• Perdita di conduttività
• Deriva della calibrazione
Inoltre, le discrepanze tra proprietà termiche, meccaniche ed elettriche nei materiali a strati possono produrre instabilità a lungo termine. Questi modi di fallimento sono particolarmente difficili perché possono rimanere nascosti durante cicli di test brevi, eppure spesso determinano la durata effettiva del prodotto.
La performance a lungo termine dovrebbe quindi essere considerata un obiettivo di design precoce piuttosto che un elemento di verifica in una fase avanzata. I dispositivi destinati all'uso quotidiano richiedono più di una sensibilità iniziale promettente. Beneficiano di test di affaticamento accelerati, valutazione dell'adesione, strategie di incapsulamento e algoritmi di compensazione della deriva. Nella pratica, la durabilità spesso separa un prototipo attraente da un prodotto che può rimanere in servizio con meno compromessi.
Sfide trasversali e direzioni future
Sebbene le protesi, l'automazione e i dispositivi indossabili differiscano nei loro obiettivi applicativi, condividono diverse sfide fondamentali.
• Migliorare la fedeltà del segnale
• Ridurre il rumore e la diafonia
• Aumentare la durabilità meccanica
• Ridurre il consumo energetico
• Raggiungere un'integrazione più stretta tra rilevamento e decisione
In tutti e tre i settori, il campo si sta muovendo verso piattaforme più piccole, intelligenti, morbide e più autonome.
Una tendenza notevole è il passaggio dalla rilevazione passiva alla percezione attiva. I futuri sistemi tattili non si limiteranno a registrare la pressione. Interpreteranno il contesto, anticiperanno gli esiti delle interazioni e adatteranno il comportamento in tempo reale. Questo potrebbe coinvolgere diverse capacità emergenti.
• Elaborazione dei dati locale
• Autocalibrazione
• Raccolta energetica
• Comunicazione basata su eventi
I progressi con il più ampio impatto probabilmente verranno da architetture che accorciano la distanza tra rilevamento, elaborazione e risposta.
Un'altra direzione principale è il funzionamento autosufficiente. Man mano che i dispositivi tattili diventano più distribuiti e mobili, la dipendenza da ricariche frequenti o unità di potenza ingombranti diventa un vincolo sempre più serio. Elettronica a basso consumo energetico, stoccaggio flessibile, raccolta triboelettrica e circuiti neuromorfici a basso consumo probabilmente assumeranno un ruolo più importante. Una piattaforma tattile diventa molto più pratica una volta che può rimanere affidabile senza richiedere attenzione costante da parte dell'utente.
La prossima grande innovazione è improbabile che arrivi solo dalla sensibilità, poiché molti sensori offrono già una sensibilità sufficiente per dimostrazioni controllate. Il punto di svolta più significativo arriverà quando i sistemi tattili uniranno un rilevamento di alta qualità con durabilità, interpretabilità e integrazione senza soluzione di continuità nelle attività quotidiane. Il campo sta avvicinandosi a una fase in cui il successo sarà valutato meno sulla possibilità di misurare il tatto e più sulla possibilità che quel tatto possa essere utilizzato in modo naturale, continuativo e su larga scala.
Conclusione
I sensori tattili colmano il divario tra contatto fisico e intelligenza artificiale convertendo le interazioni legate al tatto in informazioni significative. Una rilevazione tattile efficace dipende non solo dalla sensibilità, ma anche dalla stabilità del segnale, dalla calibrazione e dall'interpretazione affidabile in condizioni operative reali. Man mano che la robotica, l'automazione e i sistemi intelligenti continuano ad avanzare, i sensori tattili rimarranno essenziali per migliorare la manipolazione degli oggetti, la consapevolezza ambientale e l'interazione sicura uomo-macchina.
Domande Frequenti [FAQ]
1. Perché il riconoscimento tattile è spesso più difficile della rilevazione tattile nei sistemi robotici?
La rilevazione tattile si concentra sulla misurazione delle informazioni di contatto fisico come forza, pressione, posizione o scivolamento. Il riconoscimento è più impegnativo perché deve interpretare queste misurazioni per determinare le proprietà dell'oggetto, la forma, la durezza o la condizione della presa. L'accuratezza del riconoscimento dipende fortemente dalla qualità dei dati di rilevazione, rendendola più sensibile al rumore, alla deriva e alle condizioni di contatto variabili.
2. Perché lo sviluppo dei sensori tattili è passato dal miglioramento dell'hardware a algoritmi di elaborazione del segnale e percezione?
Man mano che la tecnologia dei sensori si è evoluta, i ricercatori hanno realizzato che i segnali tattili grezzi da soli forniscono un valore limitato. Informazioni utili emergono solo dopo calibrazione, filtraggio, estrazione delle caratteristiche e interpretazione. Questo cambiamento ha portato a una maggiore enfasi sull'elaborazione dei dati, consentendo ai robot di identificare le superfici, rilevare lo scivolamento, stimare le proprietà degli oggetti e prendere decisioni di controllo intelligenti piuttosto che semplicemente misurare la forza.
3. Come migliorano i sensori di scivolamento le prestazioni di presa robotica rispetto ai sensori di forza da soli?
I sensori di forza possono misurare quanta forza viene applicata a un oggetto, ma non indicano sempre se l'oggetto sta iniziando a muoversi. I sensori di scivolamento rilevano il movimento relativo sulla superficie di contatto e possono identificare il micro-scivolamento prima che un oggetto venga lasciato cadere. Questo avviso precoce consente al sistema di controllo di regolare la forza di presa in tempo reale e mantenere una presa stabile.
4. Perché non esiste una singola tecnologia di sensing tattile che funzioni meglio per ogni applicazione?
Ogni metodo di sensing comporta compromessi diversi. I sensori piezoresistivi sono economici e facili da integrare, i sensori capacitivi offrono alta sensibilità, i sensori ottici forniscono informazioni spaziali dettagliate, i sensori piezoelettrici eccellono nel rilevare eventi dinamici e i sensori magnetici supportano il sensing multidirezionale. La scelta migliore dipende da fattori quali requisiti di sensibilità, condizioni ambientali, durata, costi e necessità di integrazione del sistema.
5. Quali fattori stanno guidando lo sviluppo futuro della tecnologia dei sensori tattili?
Si prevede che i futuri sistemi tattili si concentrino sul sensing multidirezionale, su array di sensori ad alta risoluzione, su un'integrazione più stretta con i sistemi di controllo e su un'interpretazione dei segnali più intelligente. Sviluppi emergenti come il computing edge, l'auto-calibrazione, la raccolta di energia e l'elaborazione neuromorfica mirano a creare piattaforme tattili che possano operare in modo più affidabile, efficiente e autonomo in ambienti reali.
Blog correlato
-
Foglio dati MOSFET IRLZ44N, circuito, equivalente, pinout
![Foglio dati MOSFET IRLZ44N, circuito, equivalente, pinout]()
28/08/2024
L'IRLZ44N è un MOSFET di potere N-canale ampiamente utilizzato.Rinomato per le sue eccellenti capacità di commutazione, è molto adatto per numerose... -
Quanti zeri in un milione, miliardi di trilioni?
![Quanti zeri in un milione, miliardi di trilioni?]()
29/07/2024
Milioni rappresenta 106, una figura facilmente raggruppabile rispetto agli articoli di tutti i giorni o agli stipendi annuali. Miliardi, equivalenti a... -
Temperatura della batteria troppo bassa, la ricarica si è fermata.Come risolverlo?
![Temperatura della batteria troppo bassa, la ricarica si è fermata.Come risolverlo?]()
06/10/2024
I problemi di ricarica della batteria del telefono cellulare sono comuni ma possono essere gestiti efficacemente.La temperatura svolge un ruolo import... -
BC547 Guida completa del transistor
![BC547 Guida completa del transistor]()
04/07/2024
Il transistor BC547 è comunemente usato in una varietà di applicazioni elettroniche, che vanno dagli amplificatori di segnale di base a circuiti di ... -
Una guida completa ai multiplexer e il loro ruolo nei sistemi digitali
![Una guida completa ai multiplexer e il loro ruolo nei sistemi digitali]()
20/09/2025
I multiplexer sono componenti nei sistemi digitali, progettati per incanalare più segnali di input in una singola linea di output utilizzando segnali... -
Guida completa al SCR (raddrizzatore controllato al silicio)
![Guida completa al SCR (raddrizzatore controllato al silicio)]()
22/04/2024
I rettificatori controllati al silicio (SCR), o tiristi, svolgono un ruolo fondamentale nella tecnologia elettronica di potenza a causa delle loro pre... -
LR621, SR621SW, 364, Equivalenti della batteria AG1 e sostituzioni
![LR621, SR621SW, 364, Equivalenti della batteria AG1 e sostituzioni]()
15/07/2024
Le batterie del pulsante LR621 e SR621SW sono prevalenti in dispositivi elettronici compatti come orologi, piccoli giocattoli, calcolatori e chiavi re... -
CR2450 vs CR2032 Confronto: tutto ciò che devi sapere
![CR2450 vs CR2032 Confronto: tutto ciò che devi sapere]()
15/09/2025
Batterie per bottoni come CR2450 e CR2032 alimentano molti elettronici quotidiani, da orologi e telecomandi ai dispositivi medici e industriali.Sebben... -
Fondamenti di circuiti di amplifica operatoria
![Fondamenti di circuiti di amplifica operatoria]()
28/12/2023
Nell'intricato mondo dell'elettronica, un viaggio nei suoi misteri ci porta invariabilmente a un caleidoscopio di componenti del circuito, sia squisit... -
Confrontare le differenze e le applicazioni di NMOS e PMO
![Confrontare le differenze e le applicazioni di NMOS e PMO]()
15/11/2024
Comprendere le differenze tra i transistor NMOS e PMOS è importante nella progettazione di circuiti efficienti.NMOS (metallo-ossido-semiconduttore di...










Parti calde
- DS1315E-336
- HV9931LG-G
- KM48S2020CT-F10
- VT1115SFCX
- NCP1271D65R2G
- EP4SGX230FF35C2XN
- DS1961S-F5+
- HI5714/8CBZ-T
- TC74HC573A
- EF68B40P
- CDC318ADL
- PS4066ACSDX
- EGXF201ELL430MJ25S
- INSSTU32S865-LG02
- GRM1885C1H121JA01J
- R5F3562EJFE
- ISO7821DWW
- N25Q128A13ESE40F
- GAL16V8A-15QP
- V300A5C400AL3
- MCP2562-E/SN
- AT43312A-AU
- AD7543KNZ
- MAX533BEEE
- MCF5235CVM150
- GCJ32QR72J103KXJ1L
- EP3C40U484C6N
- CGA9N2X7R2A155K230KA
- LMH6682MMX/NOPB
- TPSD337M006P0045
- TMP91FW27UGF0001ZAA
- IRU3038CFTR
- MPSH10
- RT0603BRE0713KL
- TMK105B7562KV-F
- LPTM10-1247-3TG128C
- IS62WV1288BLL-55QI
- VE-222-IX
- T491D226M020ATAUTO
- A4937KLPBT
- A54SX08ATQG144
- TR412KMD02
- R8J32060FP-22
- TMP86CS25AFG-7GH8
- GS8342Q36AE-167I
- AT56C08-ICT2T
- M308A0SGP#UN
- OZ8952XAA7SN-E1-0-TR
- LT8210EFE#PBF
- BCM65936A0IFSBG