- Italia
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
PMIC Spiegato: Funzioni, Tipi e Applicazioni
Catalogo

Esplorare il PMIC
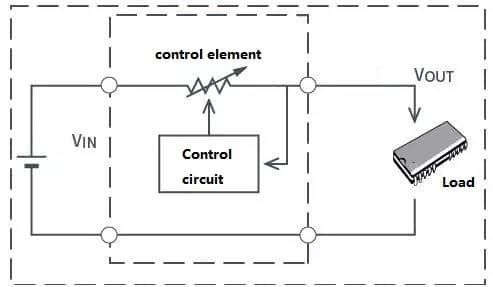
Un PMIC (Circuito Integrato di Gestione dell'Energia) è un IC dedicato che accetta uno o più ingressi di alimentazione e produce più linee di alimentazione regolate e controllate per i diversi carichi su una scheda. Questi carichi includono spesso processori, memoria, sezioni RF, sensori e periferiche varie.
Invece di disperdere regolatori discreti e IC di supervisione in tutto il design, un PMIC li consolida in un unico gestore del dominio di alimentazione coordinato. Per molti team, questa consolidazione porta anche una certa tranquillità durante l'avvio, perché c'è un solo posto da controllare quando le linee si comportano in modo strano.
Processori, memoria, blocchi RF, sensori e altri carichi.
Ambito funzionale
Nei prodotti reali, il contributo di un PMIC va ben oltre la conversione di tensione. Il beneficio pratico si manifesta quando si comporta come un coordinatore di potenza a livello di sistema che unisce diverse responsabilità che interagiscono naturalmente durante l'avvio, i passi di carico in tempo reale e le condizioni di guasto.
Conversione
Un PMIC può combinare diversi tipi di regolatori in modo che le linee di alimentazione focalizzate sull'efficienza e le linee di alimentazione sensibili al rumore possano essere ottimizzate separatamente. Nei design pratici, la preoccupazione principale non è spesso generare la tensione necessaria, ma mantenere una tensione stabile durante le variazioni di carico, gli eventi di avvio e altre condizioni operative impegnative.
Regolatori buck, regolatori boost, regolatori buck-boost e regolatori LDO.
Una linea che appare pulita con un carico costante può diventare visibilmente stressata sotto profili reali. L'efficienza, il ripple, la risposta transitoria e il margine termico sono comunemente esaminati attentamente quando le correnti burst della CPU, i pulsi di trasmissione RF o i picchi di campionamento dei sensori vengono testati in condizioni operative reali.
Burst della CPU, impulsi di trasmissione RF e picchi di campionamento dei sensori.
Distribuzione
Dopo che le linee sono generate, un PMIC spesso determina come vengono condivise, commutate e isolate. Qui è dove un design può sembrare robusto o fragile, soprattutto durante eventi di hot-plug, brownout e relativi ai cavi. Quando la distribuzione è gestita con cura, l'inrush è controllato, i percorsi di retroalimentazione sono limitati e una falla è meno probabile che si propaghi in un collasso su larga scala della scheda.
Abilitazioni delle linee, interruttori di carico, limitazione della corrente e ORing a diodo ideale per ingressi multi-sorgente.
Rilevamento e supervisione
La maggior parte dei PMIC integra supervisori che monitorano continuamente la salute delle linee e forniscono segnali che il firmware e l'hardware possono interpretare. In un laboratorio, queste caratteristiche smettono rapidamente di sembrare semplici aggiunte e cominciano a sembrare la differenza tra una sessione di debug pulita e una giornata trascorsa a inseguire un reset che si rifiuta di riprodursi su richiesta.
Monitoraggio della sottotensione, monitoraggio della sovratensione, rilevamento delle sovracorrenti, rilevamento termico e segnalazione di alimentazione corretta.
Una lezione che tende a rimanere impressa nei team esperti di avvio è che le soglie di alimentazione corretta e i tempi di deglitch devono essere univoci. Quando sono vaghi o mal adattati al sistema, il risultato è spesso un falso reset o fallimenti di avvio fantasma che appaiono solo in corrispondenza di temperature estreme, su determinate batterie o dopo una sequenza di reboot rapidi.
Controllo e sequenza
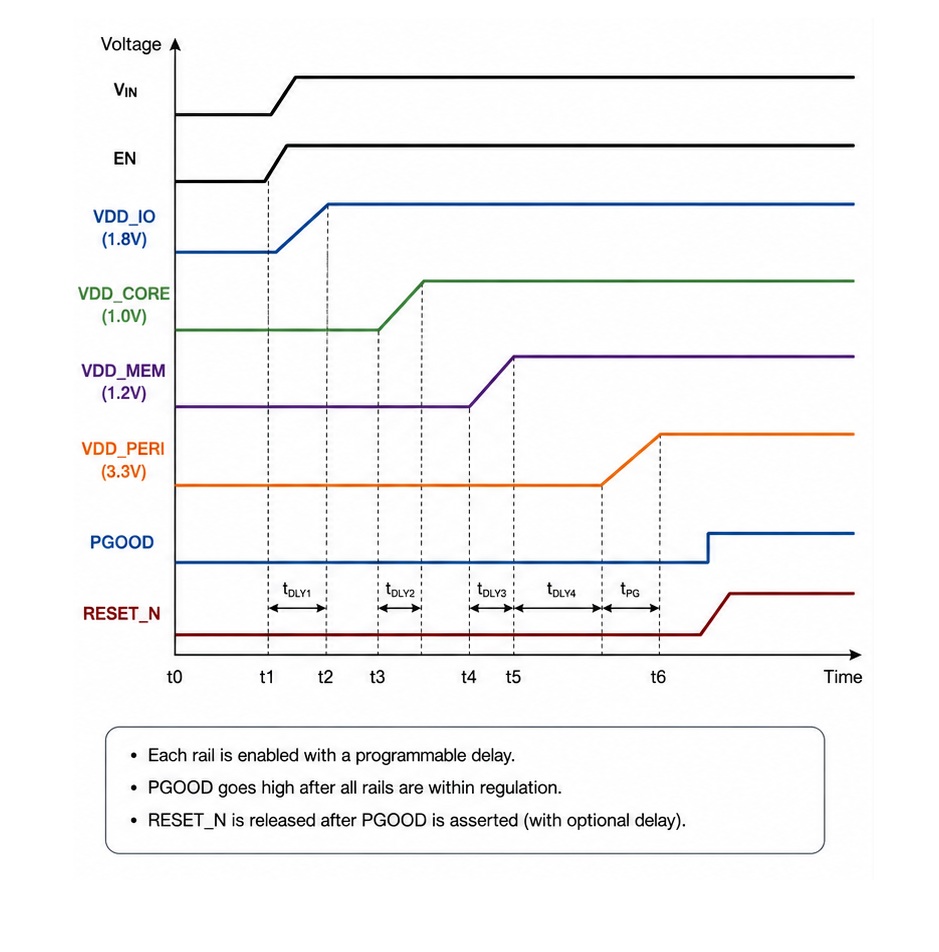
Un PMIC include frequentemente meccanismi per modellare come le linee di tensione salgono, scendono e si coordinano tra loro. Questi dettagli si traducono in risultati concreti: se un sistema si avvia in modo ripetibile, se i componenti subiscono stress evitabile e se la scheda torna a uno stato noto dopo un guasto.
Sequenze, avvio morbido, modellazione della ramp, percorsi di scarica e temporizzazione inter-rail configurabile.
Un sistema digitale tipicamente non richiede solo tensioni di stato stabile corrette; si aspetta anche che quelle linee arrivino in un ordine particolare e all'interno di relazioni temporali definite. Se le pendenze sono troppo ripide, troppo lente o semplicemente disordinate, le strutture e i domini interni possono trovarsi in condizioni definite che sono frustrantemente intermittenti, specialmente intorno al comportamento di ritenzione della SRAM e all'avvio di interfacce ad alta velocità.
Strutture ESD interne, domini di ritenzione della SRAM e interfacce ad alta velocità.
Cosa tende a plasmare i risultati nei veri progetti
Quando un team passa da un diagramma a blocchi a un prototipo funzionante, la selezione e la configurazione del PMIC spesso hanno successo o falliscono su dettagli operativi piuttosto che su specifiche a livello di marketing. Le questioni sottili sono quelle che creano pressione sul programma, perché emergono tardi e raramente si presentano come una causa radice singola e ovvia.
Affrontare transitori veloci e carichi dinamici
I moderni processori e le sezioni RF possono richiedere grandi variazioni di corrente su scale temporali di microsecondi. Un PMIC può apparire perfettamente accettabile su carta e mostrare comunque cedimenti, sovratensioni o oscillazioni una volta che il loop di controllo, l'approccio di compensazione, la rete di uscita e i parasitici della PCB devono interagire nel layout reale.
Cedimenti, sovratensioni e oscillazioni.
I team che testano la risposta ai transitori in anticipo spesso lo fanno perché hanno sentito il dolore di scoprirlo tardi. Una validazione precoce può ridurre le probabilità di un scomodo ciclo di redesign che coinvolge induttori, condensatori di uscita, componenti di compensazione o persino la scelta del PMIC stesso.
Induttori, condensatori, componenti di compensazione e il PMIC stesso.
Sequenziamento come contratto di sistema, non come comodità
Il sequenziamento dell'alimentazione funziona meglio quando è trattato come un contratto tra requisiti di silicio, assunzioni del firmware e comportamento della scheda. Quando le velocità di salita e i tempi di alimentazione corretta si discostano da ciò che il datasheet del processore si aspetta, o da ciò che il firmware presume implicitamente, tendono a comparire problemi di avvio intermittenti.
Requisiti del datasheet del processore e aspettative del firmware.
Ciò che rende questi problemi particolarmente frustranti è la loro tendenza a scomparire in condizioni amichevoli in laboratorio e a tornare durante estremi di temperatura, hot-plug della batteria o condizioni di alimentazione marginali. In quegli ambienti, il sequenziamento deterministico e il comportamento di reset prevedibile riducono le sorprese e accorciano i cicli di debug.
Temperature estreme, eventi di hot-plug della batteria e condizioni simili a black-out.
Comportamento di protezione come leva per uptime e costi di servizio
Limiti di sovracorrente, spegnimento termico e protezioni da UV/OV vengono spesso discussi nel linguaggio della sicurezza, ma i prodotti distribuiti li sperimentano come funzionalità di disponibilità. Un PMIC che limita la corrente in modo elegante, riporta guasti con sufficiente chiarezza per essere azionabili e si recupera in un modo controllato può prevenire che un piccolo guasto periferico si trasformi in un'interruzione completa del sistema e in un ticket di supporto.
Meccanismi di protezione: protezione da sovracorrente, spegnimento termico, protezione da sottotensione e protezione da sovratensione.
Benefici per l'affidabilità del sistema: limitazione della corrente elegante, segnalazione dei guasti e recupero controllato.
È spesso più accurato, e francamente più utile durante le valutazioni di design, considerare il PMIC come parte dell'architettura di affidabilità del sistema piuttosto che semplicemente come un convertitore di potenza. I progetti che invecchiano bene tendono a selezionare un PMIC in base a quanto costantemente applica stati di potenza prevedibili in condizioni di operazione normale, gestione dei guasti e transizioni.
Quando quella prospettiva viene presa seriamente, i dettagli che sono facili da sminuire durante la pianificazione iniziale iniziano a essere letti diversamente durante l'integrazione. Il comportamento di scarica delle linee, l'integrità del segnale di alimentazione corretta e la telemetria dei guasti diventano i tratti che separano un dispositivo che si accende semplicemente in laboratorio da un dispositivo che si avvia in modo pulito, ripetuto e prevedibile sul campo, senza chiedere al team di ingegneria di avere fortuna.
Categorie di PMIC
I PMIC sono spesso etichettati da una funzione principale, tuttavia nel hardware di spedizione tendono a comportarsi come un sistema di alimentazione compatto e coordinato piuttosto che come un componente a scopo singolo. Un modo pratico per classificare i tipi di PMIC è guardare a (a) cosa regolano, (b) cosa vincolano o fanno rispettare e (c) cosa connettono, disconnettono o attivamente guidano. Da una prospettiva di avvio di sistema, la linea di demarcazione che riemerge è meno riguardo ai linear versus switching e più riguardo al fatto che il PMIC sia stato costruito per gestire l'interazione rail-to-rail sotto carico variabile. Quando quell'interazione viene gestita in modo attento, le schede si sentono più tranquille durante i test di stress; quando non lo è, lo stesso design può sembrare buono su una fonte di banco e diventare capriccioso in un prodotto completamente assemblato.
Raggruppamenti Funzionali Primari
Questi blocchi generano rail, impostano punti operativi e assorbono cambiamenti nelle condizioni di ingresso. Coprono tipicamente tutto, da rail silenziosi a bassa corrente a domini digitali ad alta corrente.
• Regolazione lineare (LDO)
• Regolazione switching (buck, boost, buck-boost, inverting, cariche)
• Conversione front-end e pre-regolazione (adattatori AC/DC, stadi di assorbimento USB-PD, pre-regolatori automobilistici su alcune piattaforme)
Questi blocchi modellano come l'energia è permessa comportarsi definendo soglie, osservando confini e reagendo ai guasti. Possono non fornire watt, ma spesso decidono se un sistema fallisce in modo pulito o in modo misterioso.
• Riferimenti di tensione e bandgap
• Supervisori, monitor e comparatori a finestra
• Generazione di reset, timer watchdog e rilevamento di brownout
• Sequenziamento, tracciamento e risposta ai guasti (UV/OV, sovracorrente, risposta termica)
Questi blocchi determinano dove fluisce l'energia, quando è isolata e come i carichi esterni vengono alimentati. Nei progetti reali, sono dove i casi limite, il hot-plug, il cavo di caduta e i guasti degli accessori tendono a emergere per primi.
• Gestione del percorso di potenza
• Interruttori di carico e eFuses
• Carica della batteria
• Rail e driver relativi a display
• Driver di gate MOSFET
Tipi di Regolazione/Conversione
Gli LDO sono comunemente selezionati quando sono desiderabili bassa interferenza di uscita, flusso di design semplice e rapido comportamento a piccolo segnale. Appaiono frequentemente su blocchi RF, rail audio, sensori di precisione e su forniture relative a riferimenti ADC dove spur di ripple possono trasformarsi in perdita di prestazioni misurabile.
Il calore è spesso il fattore limitante nelle prestazioni del regolatore. Man mano che aumenta la differenza di tensione da ingresso a uscita o la corrente di carico cresce, la dissipazione di potenza e la temperatura possono diventare più importanti delle specifiche di precisione elettrica.
Una rail di potenza che appare stabile durante i test su banco aperto può sviluppare problemi di riscaldamento significativi all'interno di sistemi chiusi o ambienti ad alta temperatura dove il flusso d'aria e i margini termici sono ridotti.
I convertitori buck si occupano gran parte del carico per rail efficienti: processori applicativi, DSP, rail DDR e altri domini digitali ad alta corrente. Nella pratica, due schede che utilizzano lo stesso buck possono comportarsi in modo molto diverso a seconda della modalità di controllo, delle modalità operative a carico leggero e delle parassitiche indotte dal layout.
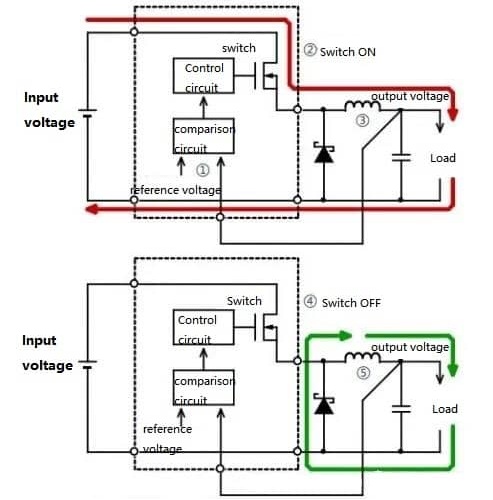
• Approccio di controllo (modalità tensione, modalità corrente, isteretico, tempo di accensione costante)
• Comportamento a carico leggero (PFM, salto di impulsi, PWM forzato)
• Risposta transitoria rispetto ai compromessi di ripple in uscita
• Postura EMI (opzioni di spettro espanso, scelte di frequenza di commutazione, sensibilità al layout)
Un dettaglio che tende a affinare le revisioni del design è la realtà del profilo di carico. Un convertitore che appare eccellente a 2 A può trascorrere la maggior parte della sua vita a 20–200 mA, dove le transizioni di modalità, la perdita di carica del gate e il sovraccarico di commutazione dominano. Confrontare solo i valori di efficienza di picco può portare a una vita della batteria in operazione reale peggiore del previsto dalle stime iniziali.
I convertitori boost vengono solitamente applicati quando la rail target deve superare la sorgente, esempi comuni includono la generazione di 5 V da una batteria a cellula singola, la creazione di bias rail per display o l'alimentazione di stringhe LED. Le topologie buck-boost sono favorite quando l'ingresso può superare e scendere sotto l'uscita desiderata, come mantenere una rail di sistema stabilizzata lungo l'intera curva di scarico della batteria.
Questi convertitori spesso sciolgono mal di testa a livello di sistema, come mantenere un dominio di 5 V stabile mentre la batteria si abbassa, ma quel sollievo comporta più parti in movimento: complessità di compensazione, comportamento del limite di corrente dell'interruttore e EMI condotto che può essere sorprendentemente sensibile alla geometria della scheda e alle condizioni del cavo.
Nei telefoni e nei piccoli moduli IoT, il brick AC/DC è comunemente al di fuori del prodotto, tuttavia la negoziazione front-end e la protezione dell'ingresso atterrano sempre più all'interno del dispositivo. Anche quando un datasheet commercializza queste come funzioni USB piuttosto che come funzioni PMIC, esse modellano fortemente la dimensione del convertitore a valle, la distribuzione del calore e lo stress nei peggiori casi.
• Supporto per rilevamento e negoziazione USB-PD
• Limitazione della corrente in ingresso e controllo dell'inrush
• Protezione da sovratensione per accessori e adattatori USB
Blocchi di Supporto di Precisione
I riferimenti influenzano l'accuratezza per ADC, DAC e soglie di comparatore. Nei prodotti a segnale misto, i dettagli che contano ripetutamente sono il comportamento dell'errore, la densità di rumore e il PSRR nell'intervallo di frequenza rilevante. Può sembrare controintuitivo, ma una piccola quantità di rumore di riferimento può manifestarsi come jitter misurabile, errore del sensore o ambiguità della soglia una volta moltiplicata per il guadagno e le scelte di filtro nel mondo reale.
I supervisori monitorano le linee per sottovoltaggio, sovratensione e violazioni di sequenziamento. Nei sistemi multi-linea, aiutano a evitare stati di mezzo-vita in cui un dominio si attiva e inizia ad eseguire mentre un altro dominio è in ritardo, in sottotensione oppure oscilla.
Da un punto di vista di affidabilità, un monitoraggio robusto tende a ridurre il tipo di resi intermittenti che frustrano tutti: problemi che si presentano solo durante avvii a freddo, lanci con batteria scarica, eventi di hot-plug rapidi o cavi borderline che non sono mai stati nel "percorso felice" del laboratorio.
Il sequenziamento è più di una sequenza A e poi B. Si trasforma in una discussione su pile di tolleranza al tempo, pendenze di ramp, relazioni di reset e cosa fa il sistema quando una linea perde la sua finestra.
La documentazione SoC specifica frequentemente le dipendenze IO-prima-del-core, vincoli di addestramento della memoria e tempi precisi di negazione del reset. I PMIC con sequenziamento programmabile e rampe controllate possono ridurre la logica di collegamento esterna e rendere il processo di attivazione meno simile a un'operazione di adivinizione, specialmente quando le schede stanno iterando rapidamente e piccole modifiche di tempo possono far risparmiare giorni di debug.
Funzioni di Potenza e di Guida
La logica del percorso di potenza decide se il sistema funziona da USB, batteria o una combinazione di entrambi, e influisce su cosa accade durante le transizioni.
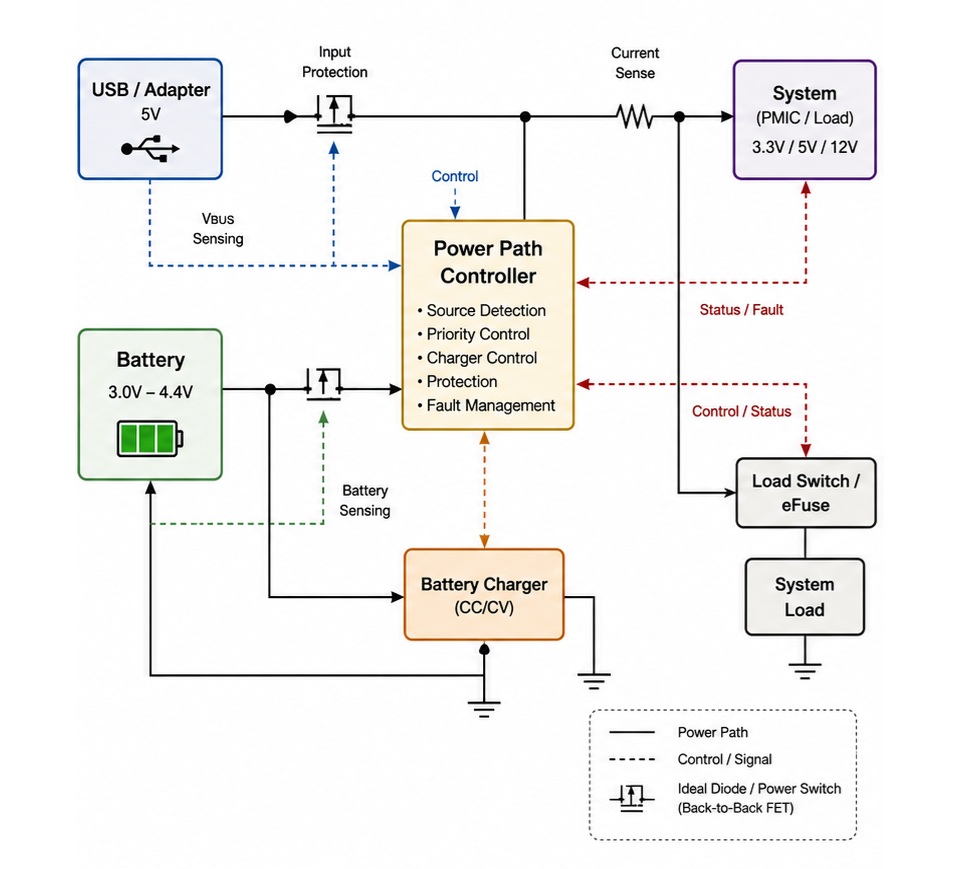
• Comportamento di switchover senza soluzione di continuità (limitando le cadute che attivano i reset)
• Limitazione della corrente in ingresso per adattarsi a USB/adattatori e vincoli di conformità
• Comportamento di diodo ideale per ridurre la corrente inversa
Una trappola ricorrente nel mondo reale è sottovalutare la resistenza nei cavi, nei connettori e negli elementi di protezione. Durante un transitorio veloce, il PMIC può comportarsi esattamente come progettato e il sistema può comunque subire un abbassamento di tensione perché il percorso a monte si deforma più di quanto il modello prevedesse. Quei fallimenti sembrano "ingiusti" fino a quando l'impedenza del percorso completo non viene misurata e trattata come parte del design, non una nota a piè di pagina.
I caricabatterie variano nel supporto della chimica delle batterie, topologie di circuito, caratteristiche termiche e obiettivi di design. Le priorità comuni includono una ricarica più rapida, una temperatura superficiale più bassa, riduzione dell'EMI, o mantenere le prestazioni del sistema mentre si ricarica.
• Caricabatterie lineari
• Caricabatterie switching
• Modalità power-bank/OTG
La selezione spesso si riduce a budget termico, vincoli normativi o di interoperabilità e se si prevede che il dispositivo sostenga prestazioni complete mentre si carica senza apparire lento o diventare scomodo caldo.
Gli interruttori di carico sono comunemente usati per gestire le linee per la riduzione della potenza in standby e per isolare i domini durante stati di guasto o di spedizione. Gli eFuses aggiungono limiti di corrente programmabili, timer di guasto e comportamento controllato di accensione.
In molti prodotti, questi blocchi ripagano la loro area sulla scheda trasformando modalità di guasto disordinate, cortocircuiti nei connettori, errori di accessori, eventi di collegamento errato, in incidenti contenuti anziché reset a cascata o danni fisici che sono costosi da diagnosticare e ancora più difficili da riprodurre.
I sistemi di visualizzazione spesso richiedono più linee di alimentazione come AVDD, VGH e VGL con sequenziamento di avvio attentamente controllato per evitare artefatti visibili sul display. I driver LED devono anche regolare con precisione la corrente e rispondere in modo affidabile a guasti di circuito aperto e cortocircuito perché queste condizioni si verificano comunemente durante il funzionamento.
I driver di gate e le fasi ad alta potenza diventano sempre più rilevanti in robotica, automotive e attrezzature industriali, dove il controllo dei motori e la conversione a tensioni più elevate si intersecano con politiche di coordinamento, telemetria e protezione in stile PMIC.
Il Tipico “PMIC per Telefono/IoT”
In molti telefoni e moduli IoT compatti, un PMIC è meglio compreso come una miscela deliberata di blocchi piuttosto che una singola categoria. L'integrazione è solitamente mirata a ridurre l'area del PCB, semplificare il sequenziamento e fornire al firmware un unico posto per osservare e influenzare il comportamento della potenza.
• Molti convertitori buck ad alta efficienza per CPU, GPU, memoria e linee sempre attive
• Uno o più LDO per linee analogiche a bassa rumorosità e RF
• Circuiti di ricarica e di percorso di potenza per coordinazione USB e batteria
• Monitor, sequenziatori, controlli termici e segnalazione di interruzioni per telemetria e gestione dei guasti
Ciò che tende a dominare i risultati è l'interazione dei rail. Un buck transiente può accoppiarsi in un RF LDO attraverso l'impedenza di terra condivisa. Il foldback termico del caricabatterie può ridurre silenziosamente la corrente di sistema disponibile, e quel cambiamento può portare un rail principale in droop durante un picco di carico. I progetti che valutano ogni blocco in isolamento sembrano spesso puliti nei primi test di banco e poi diventano complicati durante i test di stress integrati, quando tutto sta commutando, riscaldando e negoziando simultaneamente.
Selezione e Integrazione
I regolatori di commutazione vengono scelti tipicamente per ridurre la dissipazione, tuttavia possono introdurre ripple ed EMI che si diffondono in domini sensibili. Gli LDO spesso calmano il rumore, ma il costo si manifesta come calore quando il margine di tensione è generoso o la corrente non è trascurabile.
• Regolatori di commutazione: maggiore efficienza, maggiore lavoro di gestione del ripple/EMI
• LDO: minor rumore, maggiore dissipazione di calore quando si riduce la tensione
Un compromesso che funziona spesso bene è usare un buck per creare un rail intermedio, poi usare un LDO per il rail finale sensibile, purché il margine e il comportamento termico siano stati pianificati deliberatamente, invece di essere lasciati in sospeso dopo altre decisioni.
I cambiamenti rapidi di carico richiedono anelli di controllo veloci, un design di compensazione appropriato e una capacità di uscita sufficiente per mantenere una regolazione stabile durante i primi microsecondi di risposta. La selezione dei condensatori implica più che semplicemente aumentare la capacità. La capacità efficace può diminuire a causa del bias DC, delle variazioni di temperatura e dell'invecchiamento. L'ESR e l'ESL influenzano anche la stabilità del circuito, la risposta transitoria e le prestazioni EMI, rendendoli considerazioni di design importanti.
I team che convalidano con il dielettrico del condensatore esatto, il rating di tensione e la dimensione del case previsti per la produzione tendono ad evitare sorprese di stabilità nelle fasi finali, specialmente quando le catene di approvvigionamento forzano sostituzioni equivalenti che sono equivalenti solo sulla carta.
Il comportamento del PMIC sotto guasto può essere progettato attorno a diverse filosofie. Un approccio cerca di dare degradazione graduale, gestione delle cadute di tensione, throttling dei suggerimenti al processore, riduzione selettiva dei rail, affinché il sistema rimanga utilizzabile in una modalità ridotta. Un altro approccio impone uno spegnimento deterministico per raggiungere rapidamente uno stato sicuro noto.
• Degradazione graduale: spesso allineata agli obiettivi di esperienza utente nei prodotti di consumo
• Spegnimento deterministico: spesso allineato a comportamenti prevedibili nei design orientati alla sicurezza
Il PMIC che si adatta meglio è di solito quello il cui sequenziamento e risposte ai guasti corrispondono al comportamento previsto del prodotto, non quello che si limita a pubblicizzare la checklist più lunga.
Frequenze di commutazione più elevate e stadi di potenza a banda larga stanno aumentando la densità di potenza realizzabile, ma creano anche requisiti di layout PCB più rigorosi e maggiore sensibilità EMI. Allo stesso tempo, funzionalità software come telemetria, interruzioni, funzioni di registrazione e politiche di controllo programmabili stanno diventando fattori importanti nella gestione e integrazione complessiva del sistema di potenza.
I PMIC che mantengono un comportamento di potenza prevedibile sotto carichi reali possono ridurre notevolmente il tempo di debug, specialmente nei sistemi che gestiscono radio, processori, operazioni di ricarica e limiti termici simultaneamente.
Ambito di applicazione del PMIC
I PMIC compaiono ovunque l'energia elettrica deve essere convertita, distribuita, sequenziata, osservata e protetta mantenendo perdite e interferenze sotto controllo. Vengono utilizzati regolarmente in progetti di consumo, enterprise, automobilistici e industriali, tuttavia la linea di demarcazione di solito non è il mercato finale, ma come appare l'albero di potenza in pratica. Nel momento in cui un prodotto contiene più rail con tolleranze di rumore diverse, comportamenti di carico a gradini diversi e aspettative di guasto diverse, il PMIC smette di sembrare una "scelta della parte" e inizia a comportarsi come una forza di modellamento sul comportamento del sistema. In molti progetti reali, una volta che un processore ad alte prestazioni è abbinato a radio, sensori, memoria e I/O ad alta velocità, l'architettura di potenza finisce per limitare ciò che la piattaforma può fornire in modo coerente, anche quando il calcolo e il software sembrano solidi sulla carta.
Dove il comportamento del PMIC limita i risultati del sistema nel mondo reale
Risposta transitoria del carico che silenziosamente stabilisce il limite
Le CPU e le GPU moderne estraggono passi di corrente improvvisi durante attività di boost e burst, e quei passi possono essere sorprendentemente impietosi. Quando l'anello di controllo del PMIC, la capacità di uscita e l'impedenza di distribuzione non riescono a mantenere il rail all'interno di limiti stretti, i team software spesso rispondono in modi che sono sottili ma costosi: accorciano le finestre di boost, riducono i picchi di clock, o inseriscono bande di guardia più ampie affinché i crash non si presentino sul campo. Da un punto di vista ingegneristico, quel compromesso può sembrare frustrante perché la piattaforma può sembrare efficiente mentre lascia comunque prestazioni inutilizzate sotto traffico realistico.
I team che convalidano solo con carichi statici o schemi di laboratorio ordinati tendono a impararlo tardi. I carichi di lavoro reali creano bordi frastagliati: brevi esplosioni di gioco, picchi di inferenza AI e eventi di coesistenza radio possono produrre cali di tensione che non sono mai apparsi quando il rail è stato esercitato con un profilo di panca benigno. La lezione scomoda è che un comportamento transitorio ripetibile sotto carichi di lavoro disordinati spesso acquista più prestazioni utilizzabili che inseguire un numero di efficienza lusinghiero in un singolo punto operativo.
Ripple e Rumore a Banda Larga Che Si Trasforma in Debito di Integrità del Segnale
Il ripple non dovrebbe essere trattato solo come un parametro di prestazione analogica. Gli armonici di commutazione e il rumore a banda larga possono influenzare la risoluzione dell'ADC, aumentare il rumore di fase RF e ridurre il margine di segnale SERDES, specialmente quando i rails di alimentazione condividono percorsi di ritorno o accoppiano attraverso induttanza di pacchetto e PCB. Un rail di alimentazione che appare pulito nei test a singolo rail può comportarsi in modo molto diverso vicino a interfacce ad alta velocità, antenne o sezioni di memoria densa.
Le realtà del layout cambiano anche la storia. I vincoli meccanici e le aree di esclusione costringono a compromessi, e quei compromessi possono amplificare percorsi di accoppiamento che erano invisibili in un layout ideale. In pratica, una soluzione di alimentazione guadagna fiducia quando rimane stabile e silenziosa sotto posizionamenti imperfetti e routing non ideali, non solo quando viene misurata in una configurazione demo nei migliori casi.
Avvio e Sequenziamento Che Modificano I Risultati di Affidabilità
L'ordine di accensione e il comportamento di ramp-up decidono se l'addestramento della memoria si completa in modo coerente, se le radio si calibrano senza strani fallimenti angolari e se i domini sempre attivi rimangono stabili durante le fluttuazioni di tensione. Una sequenza marginale produce spesso il tipo di modello di fallimento che prosciuga tempo e morale: "uno su cinquanta avvii", difficile da riprodurre e ancora più difficile da fare il debug una volta che il sistema è completamente integrato.
La sequenziazione tende a funzionare meglio quando viene gestita come parte del comportamento di reset e recupero piuttosto che come una lista di controllo tardiva. I progetti che resistono in produzione di solito trattano l'intero percorso di accensione/spegnimento come una macchina a stati ripetibile, quindi lo dimostrano sotto i tassi di ramp-up peggiori, temperature fredde e condizioni di batteria scarica. Il ciclo di alimentazione automatizzato è spesso dove si guadagna fiducia, perché espone i margini intermittenti che alcuni passaggi manuali di accensione non rivelano mai.
Criteri di Selezione come Spazio di Commercio del Sistema
Efficienza Valutata Attraverso le Modalità, Non Come Un Numero Trofeo
L'efficienza cambia significato a seconda di come il prodotto trascorre effettivamente il suo tempo. L'efficienza al carico massimo può apparire impressionante nelle specifiche, ma la durata reale della batteria e le prestazioni termiche dipendono da molte condizioni operative, inclusi l'elaborazione a impulso, il carico normale, il carico leggero e il funzionamento in sonno profondo. Le perdite di commutazione, le perdite di conduzione e la corrente quiescente competono in modo diverso in ogni regione, e il "vincitore" cambia con il profilo di carico di lavoro.
Per i design alimentati a batteria, il basso Iq e l'alta efficienza a carico leggero si traducono spesso direttamente in un tempo più lungo tra le ricariche, che i team di prodotto tendono a considerare in modo molto concreto. Per server e apparecchiature di rete, le perdite di conduzione e le restrizioni termiche di solito dominano perché il corrente sostenuta e la rimozione del calore diventano la realtà quotidiana. Un modo pratico per decidere è mappare gli obiettivi di efficienza alla distribuzione temporale dei carichi di lavoro, invece di ottimizzare un punto operativo che quasi mai si verifica sul campo.
Margine Termico Che Impedisce al Sistema di Collassare Sotto il Calore
I limiti termici definiscono frequentemente la corrente massima sostenibile, che a sua volta definisce il massimo calcolo sostenuto. Un PMIC può apparire elettricamente eccellente e comunque mancare gli obiettivi di sistema se il suo pacchetto, rame e posizionamento creano hotspot locali vicino a memoria, involucri di schermatura o blocchi RF sensibili alla temperatura. Nelle reali assemblaggi, piccoli innalzamenti di temperatura possono innescare comportamenti di derating, soglie protettive o preoccupazioni di affidabilità a lungo termine che nessuno vuole spiegare dopo il lancio.
I progetti che invecchiano bene pianificano solitamente un margine termico. Quella pianificazione si manifesta spesso come caratteristiche termiche del pacchetto che corrispondono al carico, capacità multi-fase quando il profilo di corrente lo giustifica e una strategia di layout che disperde il calore mantenendo i loop di corrente abbastanza corti da evitare di trasformare le soluzioni termiche in problemi di rumore.
Vincoli EMI Che Inflazionano I Costi di Programma e Iterazione
La frequenza di commutazione, i tassi di transito e la topologia di controllo influenzano fortemente se l'EMI può essere gestita con filtri semplici o diventa un ciclo di spin della scheda e sessioni notturne in laboratorio. La conformità alla scheda dati è solo una parte della storia; la sensibilità del layout può dominare i risultati. Una soluzione che richiede una geometria del loop quasi perfetta può diventare una scommessa quando i vincoli meccanici costringono un posizionamento scomodo.
Molti team finiscono per preferire una soluzione leggermente più lenta e controllabile, con tassi di variazione gestibili e comportamento spettrale prevedibile, perché riduce i tempi di debug e abbassa il rischio di certificazione. Questa scelta può sembrare conservatrice, ma spesso rispecchia la realtà che i problemi EMI tendono a manifestarsi tardi, quando il programma è meno indulgente.
Caratteristiche di protezione che definiscono l'esperienza di guasto e il comportamento del servizio
Il comportamento di protezione influisce fortemente sulla risposta del sistema durante le condizioni di guasto. Le impostazioni di protezione OCP, OVP, OTP e cortocircuito possono determinare se il sistema esegue uno spegnimento pulito, entra in modalità latch-off o si riavvia ripetutamente con un comportamento instabile. Queste risposte influenzano direttamente la difficoltà di risoluzione dei problemi, i requisiti di supporto e la percezione generale dell'affidabilità del prodotto.
Le impostazioni di protezione interagiscono anche con gli eventi operativi normali. Un limitatore di corrente aggressivo può ridurre il rischio di danni, ma può anche attivare riavvii ripetuti durante momenti di elevato picco di corrente o di avvio. La gestione dei guasti funziona tipicamente meglio quando è ottimizzata come parte della strategia di servizio prevista, decidendo ciò che dovrebbe essere riprovato, ciò che dovrebbe attivarsi, ciò che dovrebbe registrare e ciò che dovrebbe guastarsi rapidamente, piuttosto che lasciato come valori di registro predefiniti.
Costo di integrazione che include firmware, convalida e realtà di debug
Il costo di integrazione raramente si ferma al BOM e all'area PCB. Include lavoro di firmware, ambito di convalida, tempo di test, robustezza di produzione e il carico di debug quando qualcosa non si comporta come previsto. I PMIC altamente integrati possono ridurre il conteggio dei componenti, il che è allettante, ma concentrano anche il rischio: una modifica tardiva su un rail potrebbe attivare la riconvalida di una porzione più ampia dell'albero di alimentazione rispetto a quanto pianificato dal team.
Approcci più discreti possono aumentare lo sforzo di layout e la gestione dei componenti, ma possono anche offrire modularità e sostituzione più semplice se le condizioni della catena di fornitura cambiano o se sono previsti aggiornamenti a metà vita. La lente di selezione più onesta è l'appetito per il rischio del programma: sensibilità al programma, numero iterativo previsto e quanto spesso il design è probabile che venga rivisto dopo il rilascio iniziale.
Caratteristiche di alimentazione digitale: flessibilità che comporta vincoli
Telemetria, rail programmabili e scaling dinamico della tensione possono portare veri vantaggi: ottimizzazione dell'alimentazione più precisa, diagnostica degli errori più chiara e scaling delle prestazioni adattive che tiene traccia del carico di lavoro e della temperatura. Allo stesso tempo, queste caratteristiche richiedono dipendenze da firmware, controllo della configurazione, disciplina di programmazione di produzione e modalità di guasto completamente nuove che non esistono in configurazioni analogiche più semplici. La telemetria diventa preziosa solo quando i dati raccolti vengono utilizzati attivamente per il monitoraggio e le decisioni progettuali invece di rimanere inutilizzati nei dashboard diagnostici.
Da un punto di vista pratico, l'alimentazione digitale giustifica la sua esistenza quando chiude un ciclo misurabile. Se la programmabilità può essere utilizzata per recuperare il rendimento, estendere la durata della batteria o prevenire il throttling termico con politiche controllate, diventa una leva potente. Se è attivata semplicemente perché è disponibile, spesso si trasforma in una superficie di configurazione inutilizzata che complica la convalida, aumenta il rischio di misconfigurazione nella produzione e crea ambiguità su quali impostazioni siano realmente intese.
Un flusso di selezione e convalida pratico che tiene traccia del comportamento del sistema
Un flusso di lavoro che tende a reggere sotto pressione parte dagli obiettivi di comportamento del sistema piuttosto che scannerizzare un catalogo di PMIC e sperare che l'adattamento funzioni in seguito. Divide il problema in blocchi concreti e testabili e costringe a una chiarezza su cosa significhi un buon comportamento prima dell'accensione della scheda.
• Convertire i transitori di carico in requisiti del rail (caduta consentita, tempo di assestamento, corrente di picco, frequenza di ripetizione).
• Definire budget di rumore per blocchi sensibili (ADC, PLL, SERDES, RF) e mappare questi ai limiti di ondulazione e alle assunzioni di layout.
• Specificare sequenze, dipendenze da reset e recupero da brownout come una macchina a stati.
• Valutare il rischio EMI precocemente utilizzando vincoli di posizionamento realistici e l'approccio di schermatura previsto.
• Convalidare il comportamento di protezione con iniezione di guasti che somiglia a cortocircuiti reali, eventi di cavo e cali di tensione della batteria.
ADC / PLL / SERDES / RF
Questo stile di approccio riduce le sorprese in fase avanzata perché tratta il PMIC come il meccanismo che governa il comportamento dell'alimentazione a livello di sistema, non come un servizio di sfondo. Quando l'alimentazione è progettata come un sottosistema di prima classe, le prestazioni diventano più coerenti, l'affidabilità diventa più facile da difendere con i dati e il lavoro di conformità tende ad essere più prevedibile, mentre il team spende meno tempo a inseguire guasti intermittenti che originano nei rail piuttosto che nella logica o nel software.
Direzioni Future per i PMIC
Una maggiore densità di potenza e voltaggi di core più bassi lasciano i PMIC a regolarsi con un margine elettrico più ristretto e meno tolleranza per i ritardi. Man mano che le linee di alimentazione si avvicinano al punto di funzionamento minimo di un carico digitale, anche un droop modesto può manifestarsi come errori soft, reset o limitazioni delle prestazioni che sembrano "misteriose" durante l'accensione del sistema. Questo sposta gradualmente l'attenzione progettuale da quanto sia preciso un rail a stato stazionario a come si comporta durante eventi di carico veloce e nei peggiori casi.
I team si trovano spesso di fronte a una realtà scomoda: un loop che sembra calmo sulla panca può comunque comportarsi in modo anomalo nel prodotto una volta che i carichi reali creano bruschi passi di carico, punti caldi localizzati e condivisione di corrente di fase non uniforme. Un modello più resistente è trattare la progettazione del loop, le scelte dei power stage e l'impedenza PDN come un sistema accoppiato unico, quindi verificare il comportamento utilizzando firme di carico rappresentative piuttosto che impulsi puliti e idealizzati.
Transitori più rapidi naturalmente portano i progetti verso loop più stretti, eppure loop più stretti rendono anche i progetti più esposti all'induttanza parassitaria, alle tolleranze accumulate e al rumore di rilevamento che è facile sottovalutare all'inizio. In molti programmi, la differenza tra stabile e stabile in campo deriva da un miglioramento della modellazione a piccolo segnale, da un'accurata rilevazione della corrente e da una compensazione sintonizzata con consapevolezza del layout reale.
Aumentare la frequenza di commutazione può aiutare, ma non si traduce automaticamente in un migliore comportamento transitorio se il percorso di rilevamento e la geometria della PCB non possono supportare la larghezza di banda aggiuntiva. Quando si verifica quel disallineamento, il guadagno di loop viene speso ad amplificare il rumore, che può manifestarsi come switching irregolare, artefatti udibili in determinati modi di funzionamento o picchi EMI che appaiono solo dopo l'integrazione meccanica.
I moderni blocchi di elaborazione e connettività generano una domanda che è burst e compositiva, quindi la validazione transitoria rispecchia sempre di più ciò che il software e le radio fanno realmente piuttosto che ciò che una scatola di carico può approssimare con un singolo step.
Molti team convergono su un flusso di lavoro che combina:
• Passi di carico in laboratorio
• Log delle telemetrie della piattaforma
• Aggiornamenti iterativi delle scelte di compensazione e decoupling.
Questo approccio tende a ridurre le sorprese nella fase finale, soprattutto quando i limiti termici plasmano lentamente il comportamento elettrico e spostano i margini nel tempo.
La pressione per ridurre le dimensioni migliorando le prestazioni sta estendendo l'integrazione nel pacchetto e nella struttura circostante, non solo nel die. Il packaging avanzato e i passivi integrati possono accorciare i loop ad alta di/dt, ridurre i parassitici e stringere la risposta transitoria in modi che sembrano immediatamente misurabili durante il debug. I magnetici integrati possono ulteriormente aumentare la densità di potenza, ma il beneficio è spesso bloccato da percorsi termici, vincoli meccanici e da come il accoppiamento cambia una volta che il design è all'interno del suo vero involucro.
Nei prodotti distribuiti, i guadagni più duraturi dall'integrazione provengono frequentemente dalla riduzione della sensibilità alle variazioni di costruzione e dalla stabilizzazione delle prestazioni attraverso la diffusione della produzione, piuttosto che dal semplice taglio della distinta dei materiali.
La selezione del pacchetto riflette sempre di più i risultati elettrici e termici, inclusa una minore induttanza del loop, un miglioramento della diffusione del calore e un controllo dell'impedenza più prevedibile. Una lezione comune sul campo è che due schede che condividono lo stesso schema possono divergere nettamente nel comportamento quando un design preserva un loop di corrente compatto e l'altro disperde il percorso di potenza attraverso la PCB.
Man mano che aumenta l'integrazione del sistema, la pianificazione del layout viene spesso prioritizzata prima nello sviluppo poiché le modifiche tardive ai componenti non possono sempre correggere i problemi causati da una geometria scadente o dal routing della PCB.
I magnetici integrati possono aumentare l'efficienza a frequenze superiori e ridurre l'altezza in z, il che è attraente in prodotti confezionati in modo compatto. Allo stesso tempo, possono introdurre nuovi percorsi di accoppiamento e creare punti caldi termici che sono difficili da rilevare fino ai prototipi tardivi. I design che procedono senza intoppi trattano solitamente l'induttore e il pacchetto come argomenti di co-progettazione EMI e termica combinata, comprese le decisioni di posizionamento vicino alle antenne, ai link ad alta velocità e ai sensori sensibili.
La pratica EMI sta tendendo a allontanarsi da mitigazioni puramente statiche e verso strategie di controllo che anticipano le condizioni operative. Tecniche come la modulazione a spettro allargato, una guida più intelligente del gate e un rilevamento on-chip più ricco possono ridurre i picchi, ma richiedono anche coordinamento per evitare di scambiare semplicemente le emissioni di picco con rumore a banda larga o interferenze radio.
Molti team hanno visto la sequenza svolgersi: i controlli EMI iniziali passano, poi successivi build falliscono quando più regolatori si commutano in schemi correlati, quando un nuovo programma firmware cambia il tempo di carico o quando cavi e schermi spostano i percorsi di ritorno. Queste esperienze spingono a pensare l'EMI a livello di piattaforma piuttosto che trattare ciascun regolatore come un box isolato.
Man mano che i bordi di commutazione aumentano di velocità, il controllo di dv/dt influenza sempre di più sia le emissioni che lo stress a lungo termine. I driver di gate stanno aggiungendo maggiore programmabilità e la logica di protezione sta diventando più consapevole del contesto, il che può far sì che la sintonizzazione sembri più ingegneria di sistema che selezione di componenti.
Un'abitudine pratica che fa risparmiare tempo è quella di sintonizzare i tassi di commutazione utilizzando misurazioni effettuate nella configurazione meccanica finale, poiché schermatura, cablaggi e strutture di terra spesso cambiano il risultato dell'EMI in modi che una scheda nuda non rivela.
Un miglioramento nel rilevamento on-chip consente comportamenti adattivi come la modifica del comportamento di commutazione quando le emissioni si avvicinano a un limite o quando cambia la modalità operativa. Col tempo, questo spinge i PMIC lontano da un comportamento a funzione fissa e verso sottosistemi gestiti che negoziano continuamente prestazioni, rumore e condizioni termiche in base al feedback piuttosto che ad assunzioni.
I sistemi alimentati a batteria continuano a cercare correnti di quiescenza ultra-basse e forte efficienza a carico leggero utilizzando tecniche come il funzionamento PFM/burst, l'emulazione di diodi e la selezione automatica della modalità. La tensione emotiva che molti team riconoscono è che le stesse modalità a carico leggero che sembrano ottime su un datasheet possono introdurre ondulazioni, artefatti udibili o firme EMI intermittenti che si notano immediatamente anche se l'efficienza media sembra eccellente.
Per ridurre l'ambiguità, i team definiscono sempre più cosa significhi un comportamento di stand-by accettabile in termini concreti, per poi scegliere una strategia di modalità che si adatti.
Gli obiettivi comunemente specificati includono:
• Limiti di ondulazione in modalità sleep/standby
• Latency di attivazione
• Vincoli acustici/di rumore
• Comportamento EMI durante attività di housekeeping periodiche.
Nella pratica, la durata della batteria sotto cicli di lavoro realistici racconta spesso la storia in modo più affidabile dei numeri di efficienza massima, specialmente quando il ciclo di lavoro include sonno, risveglio periodico, burst radio e campionamento di sensori.
Il passaggio automatico tra modalità è allettante, ma le transizioni possono creare brevi disturbi che scompaiono nelle misurazioni medie e si manifestano solo come rari ripristini o lamentele di rumore intermittente. I progetti che sembrano "solidi" sul campo tendono a spendere uno sforzo di convalida extra proprio ai confini tra PFM e PWM, inclusi sequenziamento del risveglio, ritardi di sequenziamento e passaggi di carico a condizioni al limite.
Un modello ripetuto è che l'impostazione di efficienza più aggressiva non è sempre la scelta di prodotto più confortevole quando produce ondulazioni che variano con le condizioni o accoppiamenti di rumore difficili da riprodurre. Molti team finiscono per scegliere una configurazione che rinuncia a una piccola quantità di efficienza in cambio di un comportamento ripetibile attraverso temperatura, variazione della costruzione e scenari, il che spesso riduce il rischio di integrazione e diminuisce il supporto.
Man mano che le piattaforme di calcolo aumentano di scala, si basano sempre di più su telemetria accurata, scalatura adattiva della tensione e protezione coordinata tra molti rail. La telemetria gioca un ruolo pratico nell'ingegneria quotidiana: può accorciare l’avvio, accelerare l'analisi delle cause radice e ridurre la tentazione di sovradisegnare "giusto in caso" rivelando dove si trova effettivamente il margine.
La telemetria tende a essere più rilevante quando le condizioni cambiano rapidamente, non quando il rail è stabile e facile da misurare. I futuri PMICs probabilmente miglioreranno il comportamento di campionamento, le scelte di filtraggio e l'allineamento temporale affinché le decisioni software seguano la realtà in modo più accurato.
Una sfumatura che i team esperti tendono ad apprezzare è che più campioni non sono automaticamente più utili; coerenza, stabilità della calibrazione in base alla temperatura e chiare definizioni di larghezza di banda e latenza spesso decidono se i dati possano essere elaborati con fiducia.
Con più rail nasce una necessità più forte di un comportamento di protezione coordinato in modo che il sistema risponda in modo coerente piuttosto che rail per rail.
La coordinazione della protezione spesso abbraccia:
• Comportamento di risposta OCP
• Comportamento di risposta OVP
• Comportamento di risposta UVP
• Comportamento di risposta OTP
• Dipendenze di sequenziamento
• Politiche di recupero da guasti
• Condivisione dello stato tra PMICs
I sistemi reali falliscono frequentemente non perché manchi una caratteristica, ma perché i rail rispondono in modo diverso allo stesso evento, producendo cascateggi di abbassamento di tensione o cicli di riavvio che sono frustranti da diagnosticare. Un approccio coordinato alla gestione dei guasti, stato condiviso più un piano di recupero unificato, si adatta meglio a come ci si aspetta che le piattaforme si comportino sotto stress.
L'adozione di GaN e SiC crescerà nelle aree in cui la frequenza di commutazione e l'efficienza modificano materialmente le dimensioni o le prestazioni. Una commutazione più veloce può ridurre le dimensioni dei componenti magnetici e affinare la risposta transitoria, ma solleva anche stress legati al dv/dt, sensibilità EMI e requisiti sul design del driver di gate e sulla strategia di isolamento. Le limitazioni non sono puramente elettriche; coinvolgono anche confini operativi attraverso variazioni di produzione e scenari di uso improprio nel mondo reale che i team hanno imparato a prendere sul serio.
Le soluzioni GaN e SiC tendono a premiare un controllo preciso del gate-drive, un layout disciplinato e schemi di protezione che prevengono overshoot, oscillazioni e accensioni non intenzionate. Una intuizione pratica che appare ripetutamente è che la qualità del layout può dominare la selezione dei dispositivi; un layout ben eseguito con un dispositivo “modesto” può superare un dispositivo premium inserito in un circuito induttivo rumoroso.
Man mano che le velocità di commutazione aumentano, le scelte di isolamento e i limiti di affidabilità a lungo termine diventano più prominenti nelle revisioni di design e nella pianificazione della qualificazione. L'adozione di solito accelera dove i guadagni di prestazioni giustificano chiaramente rigorosi sforzi di progettazione, mentre i prodotti sensibili al costo o al rumore spesso si muovono in modo più cauto e richiedono prove più chiare di benefici a livello di sistema.
I PMIC sono sempre più progettati per comportarsi come esecutori di politica che arbitrano efficienza, rumore, termiche e affidabilità in tempo reale. Le architetture che tendono a invecchiare bene trattano l'energia come una risorsa gestita: la telemetria del PMIC informa la politica software, e la politica software, a sua volta, regola le modalità operative del PMIC e il comportamento delle linee di alimentazione. Questo sfuma la linea tra proprietà dell'hardware e del firmware in un modo che può sembrare scomodo all'inizio, ma spesso ripaga riducendo l'accumulo di margine e migliorando la resilienza sotto carichi di lavoro reali.
Conclusione
Una protezione efficace dei circuiti dipende da più che dall'aggiunta di un singolo componente protettivo. I progetti affidabili richiedono una corretta coordinazione tra deviazione delle sovratensioni, limitazione della tensione, limitazione della corrente, messa a terra, layout e temporizzazione dei guasti. Ogni dispositivo di protezione ha i propri punti di forza e limiti, quindi la selezione deve corrispondere al tipo di guasto previsto, livello di energia, velocità di risposta e ambiente operativo. Una strategia di protezione ben pianificata migliora la sicurezza, riduce il rischio di guasti e supporta l'affidabilità a lungo termine nei sistemi elettronici del mondo reale.
Domande Frequenti (FAQ)
1. Perché un PMIC è considerato un coordinatore di potenza a livello di sistema anziché solo un regolatore di tensione?
Un PMIC fa molto di più che convertire una tensione in un'altra. Gestisce come più linee di alimentazione vengono generate, sequenziate, monitorate, distribuite e protette in tutto il sistema. Nei progetti pratici, il PMIC coordina le linee di alimentazione del processore, le alimentazioni della memoria, le sezioni RF, i sensori e i domini periferici, occupandosi anche della temporizzazione dell'avvio, del recupero dai guasti, degli eventi termici e del segnale di alimentazione valido. Poiché tutti questi comportamenti interagiscono durante l'avvio e l'operazione in tempo reale, il PMIC diventa spesso uno dei principali fattori che influenzano l'affidabilità e la stabilità del sistema.
2. Perché i guasti relativi ai PMIC spesso si presentano solo sotto carichi di lavoro reali piuttosto che durante semplici test di laboratorio?
I test in laboratorio con carichi statici riproducono raramente il comportamento transitorio veloce generato da processori moderni, trasmettitori RF, traffico di memoria e esplosioni di sensori. In condizioni operative realistiche, le linee di alimentazione subiscono picchi di corrente improvvisi che rivelano punti deboli nella risposta transitoria, nei parasitismi PCB, nella sintonizzazione della compensazione e nella stabilità della rete di uscita. Un PMIC può apparire stabile durante i test controllati, ma successivamente mostra caduta di tensione, overshoot, oscillazioni o guasti di sequenza una volta che carichi di lavoro reali creano una domanda elettrica in rapida evoluzione.
3. Perché la sequenza di potenza è trattata come un contratto a livello di sistema invece di un semplice caratteristica di avvio?
Molti sistemi digitali richiedono relazioni temporali specifiche tra le linee di alimentazione principali, le linee di alimentazione della memoria, le alimentazioni I/O, i segnali di reset e i domini sempre attivi. Se le linee di alimentazione si alzano nel modo sbagliato o con tempi errati, i processori, i blocchi di retention SRAM e le interfacce ad alta velocità possono entrare in stati operativi non definiti. Questi problemi spesso creano guasti intermittenti all'avvio che appaiono solo durante temperature estreme, abbassamenti di tensione o condizioni di hot-plug della batteria. Pertanto, una corretta sequenza diventa un accordo coordinato tra requisiti hardware, firmware e silicio piuttosto che una funzionalità di comodità.
4. Perché la risposta transitoria del PMIC può limitare silenziosamente le prestazioni nel mondo reale di CPU e GPU?
I moderni processori generano passi di corrente bruschi durante le operazioni di boost, carichi di lavoro AI, esplosioni di gioco e attività radio. Se il PMIC non riesce a mantenere una tensione stabile durante questi eventi, il firmware potrebbe ridurre la durata del boost, abbassare la velocità di clock o allargare i margini di temporizzazione per prevenire crash. In molti prodotti, le limitazioni nella fornitura di energia limitano silenziosamente le prestazioni sostenute, anche se il processore stesso sembra capace sulla carta. La risposta transitoria stabile ha spesso più influenza sulle prestazioni utilizzabili del sistema rispetto alle specifiche di efficienza di picco da sole.
5. Perché le ondulazioni e il rumore di commutazione provenienti dai PMIC creano problemi molto più estesi rispetto al solo sottosistema di alimentazione?
Gli armonici di commutazione e il rumore a banda larga possono accoppiarsi nei circuiti RF, nei riferimenti ADC, nei PLL, nei link SERDES e nei percorsi analogici sensibili attraverso l'impedenza di terra condivisa e i parasitismi della PCB. Anche livelli di ondulazione relativamente piccoli possono ridurre la precisione dell'ADC, aumentare il rumore di fase, ridurre il margine di temporizzazione o degradare l'affidabilità della comunicazione ad alta velocità. Un'alimentazione che appare elettricamente accettabile in isolamento può creare seri problemi di integrità del segnale una volta integrata in sistemi misti densi.
6. Perché i limiti termici dei PMIC definiscono frequentemente le massime prestazioni di calcolo sostenute?
Con l'aumento della temperatura del PMIC, l'efficienza diminuisce e i meccanismi di protezione termica possono iniziare a ridurre la corrente disponibile o attivare comportamenti di piegamento. Nei sistemi compatti, i punti caldi localizzati vicino a processori, memoria o sezioni RF possono costringere il PMIC a un derating termico molto prima che vengano raggiunti i limiti elettrici teorici. Per questo motivo, le prestazioni sostenibili del sistema dipendono spesso tanto dal layout termico, dalla diffusione del rame e dalla selezione del pacchetto quanto dalle specifiche del regolatore stesso.
7. Perché gli ingegneri combinano spesso convertitori buck con regolatori LDO in progetti sensibili?
I convertitori buck forniscono una riduzione di tensione efficiente per linee ad alta corrente, ma introducono ondulazione da commutazione e EMI. Gli LDO generano una tensione di uscita molto più pulita con meno rumore, ma dissipano più calore quando riducono tensioni più elevate. Un compromesso comune utilizza un convertitore buck per generare una linea intermedia in modo efficiente, seguito da un LDO per pulire l'alimentazione finale sensibile analogica o RF. Questa combinazione bilancia efficienza, gestione termica e riduzione del rumore più efficacemente rispetto al fare affidamento su una sola topologia.
8. Perché le politiche di risposta ai guasti dei PMIC sono considerate parte dell'esperienza complessiva del prodotto?
Il comportamento di guasto determina se il prodotto si spegne in modo pulito, entra in un ciclo di reboot, rallenta in modo controllato o diventa instabile durante condizioni anomale. La protezione da sovracorrente, lo spegnimento termico, la gestione di sottotensione e i tempi di recupero influenzano direttamente come si sperimentano i guasti delle batterie, i problemi con i cavi o gli eventi di sovraccarico. Politiche PMIC ben progettate isolano i guasti in modo prevedibile e recuperano in modi controllati, riducendo la complessità del servizio e prevenendo che problemi minori si trasformino in guasti a livello di sistema.
9. Perché i moderni PMIC si basano sempre di più su telemetria e politiche di potenza programmabili?
I sistemi moderni modificano dinamicamente il carico di lavoro, lo stato termico, l'attività radio e il comportamento di ricarica in tempo reale. La telemetria PMIC consente al firmware di monitorare continuamente le condizioni delle linee, il consumo di corrente, la temperatura e gli eventi di guasto. Questi dati abilitano la scalabilità della tensione adattiva, la gestione termica, il throttling intelligente e decisioni di protezione coordinate. Tuttavia, i sistemi di potenza programmabili introducono anche una nuova complessità di validazione perché una configurazione errata del firmware può creare guasti che non esistono nei progetti analogici fissi.
10. Perché i futuri progetti di PMIC si stanno orientando verso la "orchestrazione dell'alimentazione" anziché la semplice conversione di potenza?
I futuri PMIC sono sempre più attesi a coordinare efficienza, termiche, comportamento EMI, protezione, scalabilità del carico di lavoro, politiche di ricarica e telemetria di sistema simultaneamente. Tecnologie di commutazione più veloci, margini di tensione più stretti e carichi di lavoro altamente dinamici richiedono che il PMIC adatti continuamente il proprio comportamento in base alle reali condizioni operative piuttosto che su assunzioni statiche. Questa evoluzione trasforma il PMIC in un sottosistema di gestione attiva che lavora a stretto contatto con il firmware e il software di sistema per mantenere un'operazione della piattaforma stabile, efficiente e prevedibile sotto condizioni in cambiamento.
Blog correlato
-
Quanti zeri in un milione, miliardi di trilioni?
![Quanti zeri in un milione, miliardi di trilioni?]()
29/07/2024
Milioni rappresenta 106, una figura facilmente raggruppabile rispetto agli articoli di tutti i giorni o agli stipendi annuali. Miliardi, equivalenti a... -
Foglio dati MOSFET IRLZ44N, circuito, equivalente, pinout
![Foglio dati MOSFET IRLZ44N, circuito, equivalente, pinout]()
28/08/2024
L'IRLZ44N è un MOSFET di potere N-canale ampiamente utilizzato.Rinomato per le sue eccellenti capacità di commutazione, è molto adatto per numerose... -
Temperatura della batteria troppo bassa, la ricarica si è fermata.Come risolverlo?
![Temperatura della batteria troppo bassa, la ricarica si è fermata.Come risolverlo?]()
06/10/2024
I problemi di ricarica della batteria del telefono cellulare sono comuni ma possono essere gestiti efficacemente.La temperatura svolge un ruolo import... -
BC547 Guida completa del transistor
![BC547 Guida completa del transistor]()
04/07/2024
Il transistor BC547 è comunemente usato in una varietà di applicazioni elettroniche, che vanno dagli amplificatori di segnale di base a circuiti di ... -
Guida completa al SCR (raddrizzatore controllato al silicio)
![Guida completa al SCR (raddrizzatore controllato al silicio)]()
22/04/2024
I rettificatori controllati al silicio (SCR), o tiristi, svolgono un ruolo fondamentale nella tecnologia elettronica di potenza a causa delle loro pre... -
LR621, SR621SW, 364, Equivalenti della batteria AG1 e sostituzioni
![LR621, SR621SW, 364, Equivalenti della batteria AG1 e sostituzioni]()
15/07/2024
Le batterie del pulsante LR621 e SR621SW sono prevalenti in dispositivi elettronici compatti come orologi, piccoli giocattoli, calcolatori e chiavi re... -
Fondamenti di circuiti di amplifica operatoria
![Fondamenti di circuiti di amplifica operatoria]()
28/12/2023
Nell'intricato mondo dell'elettronica, un viaggio nei suoi misteri ci porta invariabilmente a un caleidoscopio di componenti del circuito, sia squisit... -
Una guida completa ai multiplexer e il loro ruolo nei sistemi digitali
![Una guida completa ai multiplexer e il loro ruolo nei sistemi digitali]()
20/09/2025
I multiplexer sono componenti nei sistemi digitali, progettati per incanalare più segnali di input in una singola linea di output utilizzando segnali... -
Confrontare le differenze e le applicazioni di NMOS e PMO
![Confrontare le differenze e le applicazioni di NMOS e PMO]()
15/11/2024
Comprendere le differenze tra i transistor NMOS e PMOS è importante nella progettazione di circuiti efficienti.NMOS (metallo-ossido-semiconduttore di... -
CR2450 vs CR2032 Confronto: tutto ciò che devi sapere
![CR2450 vs CR2032 Confronto: tutto ciò che devi sapere]()
15/09/2025
Batterie per bottoni come CR2450 e CR2032 alimentano molti elettronici quotidiani, da orologi e telecomandi ai dispositivi medici e industriali.Sebben...










Parti calde
- MC34174VD
- C0603C0G1H101K030BA
- VI-26L-IU16X650
- LE79234KVC
- SAA7846HL
- 6MBI100VB-120-50
- MAX1797EUA+
- SC1110CS
- LC35256DM-70W
- MAX1809EEE-T
- TPSV337M010R0100
- MGA-43728-TR1G
- BD65B60GWL-E2
- 08053C392KAT2A
- BD2606MVV-E2
- 39VF200A-70-4C-Y1QE
- TPS77133DGKR
- ERB32Q5C2E221JDX1L
- LM3450AMT/NOPB
- LM22675MRE-5.0/NOPB
- LCMXO2-7000HC-6TG144C
- MAX1980ETP
- SN75ALS191PSR
- GRM1555C2A7R2CA01D
- PS2251-68-5
- PESD5V0F1BLD,315
- REF5030ID
- 18121D105KAT2A
- CGB4B1JB1E225K055AC
- HYB18TC512160B2F-3.7
- BCM5753KFBG
- FAN8045G3
- MT46V16M16CV-6IT:K
- GQM2195C2E9R0BB12D
- NAND256R3A2AZA6E
- GRM1556P1H9R3CZ01D
- MB90802NPF-G-133
- EE87C196KDH20
- 1210AA470KAT1A
- ADUM2201BRWZ-RL
- PVN012PBF
- FM2010-WE
- HY5DU283222AQ-5M
- AD9200JRSZ
- VI-J20-MY
- UPD78P018FYGC
- VM2176PLK
- NX5P3290
- MSM6544GS-2K-7
- 12061104M2